Appearance
《工程振动术语和符号标准[附条文说明]》GB/T 51306-2018
🗓️ 住房和城乡建设部 实施时间:2018-10-01
前言
中华人民共和国国家标准
工程振动术语和符号标准
Standard for terms and symbols of engineering vibration
GB/T 51306-2018
主编部门:中华人民共和国住房和城乡建设部
批准部门:中华人民共和国住房和城乡建设部
施行日期:2018年10月1日
中华人民共和国住房和城乡建设部公告
2018第24号
住房城乡建设部关于发布国家标准《工程振动术语和符号标准》的公告
现批准《工程振动术语和符号标准》为国家标准,编号为GB/T 51306-2018,自2018年10月1日起实施。
本标准在住房城乡建设部门户网站(www.mohurd.gov.cn)公开,并由住房城乡建设部标准定额研究所组织中国建筑工业出版社出版发行。
中华人民共和国住房和城乡建设部
2018年3月16日
前言
根据住房和城乡建设部《关于印发2015年工程建设标准规范制订、修订计划的通知》(建标[2014]189号)的要求,标准编制组经广泛调查研究,认真总结工程实践经验,参考有关国际标准和国外先进标准,并在广泛征求意见的基础上,编制了本标准。
本标准主要内容是:1.总则;2.通用术语;3.振动作用术语;4.振动传播术语;5.振动分析术语;6.振动影响术语;7.振动测量术语;8.振动控制术语;9.噪声控制术语;10.工程振动符号。
本标准由住房和城乡建设部负责管理,由中国机械工业集团有限公司负责具体技术内容的解释。执行过程中如有意见或建议,请寄送中国机械工业集团有限公司(地址:北京市海淀区丹棱街3号A座,邮编:100080)。
本标准主编单位 :中国机械工业集团有限公司
本标准参编单位 :中国铁道科学研究院
中国汽车工业工程有限公司
中国中元国际工程有限公司
隔而固(青岛)振动控制有限公司
中国电子工程设计院
军委后勤保障部工程兵科研三所
合肥工业大学
哈尔滨工业大学
清华大学
机械工业第四设计研究院有限公司
青岛科尔泰环境控制技术有限公司
本标准主要起草人员 :徐建 杨宜谦 万叶青 张同亿 尹学军 陈骝 杨俭 余尚江 朱大勇 李惠 燕翔 王伟强 曹雪生 胡明祎 黄伟 高星亮 邵晓岩 王建 刘鹏辉 张勇波 王巍
本标准主要审查人员 :杨永斌 张建民 史志华 任书考 张洪波 辛鸿博 刘金光 王永国 郑楠
1 总则
1 总 则
1.0.1 为统一我国工程振动的基本术语和符号,制定本标准。
1.0.2 本标准适用于建设工程及相关领域的工程振动术语和符号的使用。
1.0.3 工程振动所采用的基本术语和符号,除应符合本标准的规定外,尚应符合国家现行有关标准的规定。
条文说明
1.0.1~1.0.3 振动问题包括地震、风振等自然振动以及机械振动、交通振动、人行振动等人为振动。
本标准中术语及其含义包括通用类、振动作用、振动传播、振动分析、振动影响、振动测量、振动控制、噪声控制等,来源于工程应用、标准规范、论文专著、百科全书、外文资料中常用词汇。符号来自工程设计、标准规范等常用符号。
本标准给出了每个术语的含义,同时给出了相对应的英文术语以便与国际标准接轨,鉴于编制工程振动类术语和符号标准在我国乃至国际上尚属首次,必会存在诸多不妥之处,希望通过在今后实践中不断完善。
为了便于检索,对每个条目按对应的汉语拼音音序排列,在本标准附录中列出“术语索引”。
2 通用术语
2.1 振动体系
2 通用术语
2.1 振动体系
2.1.1 振动 vibration
物体或质点在平衡位置附近做周期性或随机性的运动。
2.1.2 振动系统 vibration system
由质量、刚度、阻尼等振动元素组成的动力学系统。
2.1.3 动刚度 dynamic stiffness
在动态条件下作用力的变化与位移的变化之比。
2.1.4 阻尼 damping
由于外界作用和(或)系统本身固有的原因引起的振幅随时间逐渐减小的特性。
2.1.5 阻尼系数 damping coefficient
在黏性或黏滞性阻尼条件下,阻尼力与振动速度的比值。
2.1.6 临界阻尼 critical damping
使振动物体刚好能不做周期性振动而又能最快地回到平衡位置的阻尼值。
条文说明
2.1.6 阻尼比也常用临界阻尼替代。阻尼比为无量纲参量。
2.1.7 临界阻尼系数 critical damping coefficient
当阻尼比为1时的阻尼系数。
2.1.8 阻尼比 damping ratio
实际阻尼系数与临界阻尼系数之比。
2.1.9 自由度 degree of freedom
结构计算时,确定物体空间位置所需的最少独立坐标数。
条文说明
2.1.9 自由度的术语解释通常基于三种系统:力学系统、机械系统、物理学系统。工程振动更接近力学系统。
2.1.10 单自由度系统 single-degree-of-freedom(SDOF)system
仅需一个独立坐标就可确定物体空间位置的结构系统。
2.1.11 多自由度系统 multi-degree-of-freedom(MDOF)system
具有两个及以上独立坐标才能确定物体空间位置的结构系统。
2.1.12 离散系统 discrete system
具有有限自由度的力学系统。
2.1.13 连续系统 continuous system
具有无限自由度的力学系统。
2.1.14 激励 excitation
作用于振动系统上的外力或其他激振形式,使系统以某种方式产生振动响应。
2.1.15 响应 response
振动系统由激励引起的运动或其他输出。
2.2 振动特性
2.2 振动特性
2.2.1 固有振动 natural vibration
系统在不受外界作用的情况下所有可能发生的振动的集合,反映系统关于振动的固有特性。
2.2.2 自由振动 free vibration
系统在外界作用消失的情况下,所发生的振动,一般指无阻尼系统的振动。
2.2.3 受迫振动 forced vibration
系统由与时间有关的外力所激发的振动。
2.2.4 自激振动 self-excited vibration
由机械系统内的能量转换成振荡激励而形成的振动。
2.2.5 共振 resonance
当外部激励频率接近结构系统某固有频率时,其振动响应达到极大值的现象。
条文说明
2.2.5 共振是力学系统在特定频率下,相比其他频率以更大的振幅(位移或速度)做振动的情形,又可称为位移共振、速度共振;这些特定频率称之为共振频率。与共振相关的概念还有:
反共振:在简谐激励下的受迫振动系统中,当激励频率等于某特定值时,激振点的稳态响应振幅达到极小值的现象。
亚谐共振:受周期激励的非线性系统,当激励频率接近固有频率整数倍时产生的大振幅振动。
超谐共振:受周期激励的非线性系统,当激励频率接近固有频率1/n时产生的大振幅振动。
2.2.6 耦合振动 coupled vibration
由于振动系统各部分间的能量传递产生不独立且相互影响的振动。
2.2.7 简谐振动 harmonic vibration
用时间为自变量的三角函数来描述的振动。
2.2.8 周期振动 periodic vibration
振动物理量随时间自变量在经过某一相同增量后能重复出现的振动。
2.2.9 随机振动 random vibration
对未来任意给定时刻,其瞬时值不能预先确定的振动。
2.2.10 稳态振动 steady vibration
周期、准周期或其组合后的连续振动。
2.2.11 瞬态振动 transient vibration
由外加瞬态激励引起的非稳态、非随机振动。
2.2.12 线性振动 linear vibration
系统中构件的弹性服从胡克定律,运动时产生的阻尼力与速度成正比的振动。
2.2.13 非线性振动 non-linear vibration
系统中某个或几个参数具有非线性值,反映为恢复力与位移不成正比或阻尼力与速度不成正比的振动。
2.2.14 冲击振动 shock vibration
系统在冲击激励作用下的振动。
2.2.15 振幅 amplitude
结构振动时,其位移、速度、加速度、内力、应力、应变等振动响应的单方向最大变化幅度。
2.2.16 相位 phase
振动物理量随时间做简谐运动时,任意时刻所对应的角变量。
条文说明
2.2.16 相位对应的是正弦信号公式中自变量的值:
x(t)=Asin((wt+φ),
当t=0时,φ即为初相位(initial phase)。
相位差(phase difference)是指两组简谐振动任意时刻所对应的角变量的差值,即:
(w1t+φ1)—(w2t+φ2)。
2.2.17 均值 mean value
表示一组数据集中趋势的量值,指算术平均值。
2.2.18 峰值 peak value
给定区间的振动量的最大值。
2.2.19 峰峰值 peak-to-peak value
一个周期内振动量最高值和最低值之间的差值。
2.2.20 均方根值 root mean square value(RMS)
将N个数项的平方和除以N后开平方的值。
条文说明
2.2.20 均方根值可按下式计算:
图1表示时域信号特征值的相互关系。
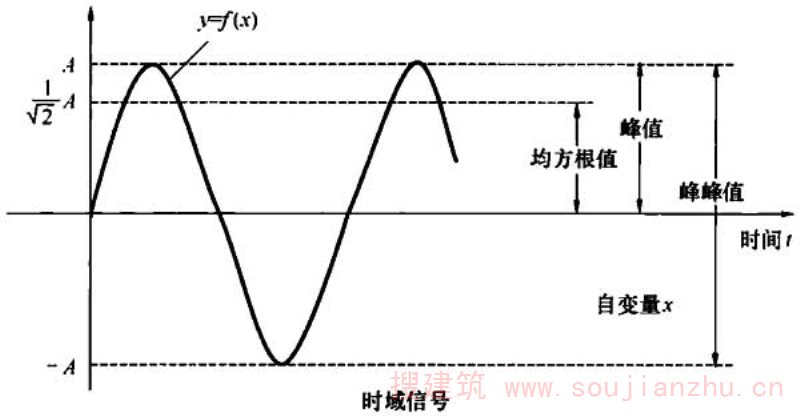
图1 时域信号特征值的相互关系
2.2.21 峰值因数 crest factor
振动信号波形的峰值与均方根值(有效值)之比。
条文说明
2.2.21 峰值因数通常用CF表示,是crest factor的缩写,CF是指振动信号波形的峰值与有效值之比。
正弦波的峰值因数是1.414;方波的峰值因数是1.00;三角波的峰值因数是1.73。实际测试的振动信号波形会产生畸变,畸变的信号波形的峰值因数可能大于1.414。通常情况,比较好的实测正弦振动信号的峰值因数不超过3,对于平稳随机过程的峰值因数可达6,而对于间歇振动,或者冲击振动峰值因数就可能超过9。
2.2.22 中心频率 central frequency
每频程的上限与下限频率的几何平均值。
条文说明
2.2.22 中心频率是频程的一个代表频率,是每频程上下限频率的几何平均值,即上限频率与下限频率乘积的开方。
3 振动作用术语
3.1 自然振动
3 振动作用术语
3.1 自然振动
3.1.1 地脉动 microtremor
由气象、海洋、地壳构造运动的自然力和交通等人为因素所引起的地球表面微弱振动,又称地微动。
条文说明
3.1.1 地脉动一般是由随机振源激发,并经不同性质的岩土层界面多次反射和折射后传播到地面而形成的振动,随机振源可以是自然原因造成的振动,例如风、海浪等;也可以是人为因素造成的振动,例如交通振动、机械振动以及施工振动等。
3.1.2 短周期地脉动 short period microtremor
波长较短,是地脉动信号中反映场地土动态特性的成分,主要是近距离的人类活动、交通运输、机械振动等人工振源引起的,为振动周期小于一秒的地脉动。
条文说明
3.1.2 严格意义上,地球表面的任何地点、任何建筑,都在发生短周期地脉动。测量短周期地脉动可应用于地基土划分、建筑性能评价以及地质调查等方面,可为工程振动提供基础性资料。
3.1.3 长周期地脉动 long period microtremor
波长较长,是地脉动中反映振源特性的分量,主要是由海浪、风等自然现象变化引起的,由较远距离的振源或海洋波浪、大气环流及地球深部构造运动激发,为振动周期一秒至几十秒的地脉动。
条文说明
3.1.3 长周期地脉动信号十分徽弱,振幅一般只有几微米。因此,振动信号的测量仪器要求具有频带宽、灵敏度高及噪声低的特性,以采集到高保真的有效波形。
3.1.4 环境振动 environmental vibration
由风、海浪、交通干扰或机械振动等天然或人为因素造成的振幅很小(微米级)的环境地面运动。
条文说明
3.1.4 环境振动可以由自然原因造成,也可以由人为因素造成,例如风、海浪、交通干扰、机械振动以及施工振动等。
3.1.5 卓越周期 predominant period
随机振动过程中出现概率最大的周期。
条文说明
3.1.5 卓越周期的发生实际上是共振现象,即激励周期与自振周期相同时,由于共振作用使振动加强。
3.1.6 平均风 average wind
在给定的时间间隔内,把风的长周期分量对建(构)筑物的作用力的速度、方向以及其他物理量都看成不随时间而改变的量。其作用性质相当于静力,又称静力风。
条文说明
3.1.6 在进行数学统计分析时,通常将平均风描述为分布特征不随时间变化的随机变量模型,而反映大气边界层紊流特征的脉动风则被模拟成均值为零的、具有各态历经特性的平稳随机过程。在近地风的两种成分对建筑结构的作用中,平均风的作用是分析结构静风响应和风致振动的基础,而分析平均风对结构作用的前提就是确定合理的基本风速。
3.1.7 脉动风 fluctuating wind
由于风的不规则性引起的,它的强度随时间随机变化,周期较短,其作用性质完全是动力的。
条文说明
3.1.7 一般来说,地面粗糙度大时,脉动风的幅值大且频率高。在实际工程中,可假定脉动风速为零均值的正态平稳随机过程。
3.1.8 风压 wind pressure
垂直于风向的平面上所受到的压力。
3.1.9 风振 wind-induced vibration
风诱发的振动,指风压的动态作用。
条文说明
3.1.9 风振会导致建(构)筑物振动,如桥梁、高层建筑以及高耸构筑物等的振动。
3.1.10 风振系数 wind-induced vibration coefficient
结构总响应与平均风压引起的结构响应的比值。
3.1.11 风力 wind power
风的强度。
3.1.12 风级 wind scale
风力的一种表示方法,通常采用蒲福风级。
条文说明
3.1.11~3.1.12 风的级别是根据风对地面物体的影响程度而确定。一般按风力大小可以划分为十二个等级。12级以上的风叫飓风,摧毁力巨大,陆地少见。
3.1.13 风向 wind direction
风的来向。
条文说明
3.1.13 风的来向包括横风向和顺风向。顺风向风效应主要由平均风速引起的平均风压和风速脉动引起的脉动风压所导致。横风向风效应的产生机理非常复杂(如:来流紊流、尾流激励和气动反馈等),研究成果还不成熟,在世界范围内的荷载设计规范或建议中,也只有日本和澳大利亚等极少数国家规范给出了简单的关于横风向风荷载的规定。
3.1.14 风速 wind speed
空气水平运动的速度。
3.1.15 基本风速 reference wind speed
不同地区气象观测站通过风速仪的大量观察、记录,并对记录数据进行统计分析进而得到该地特定重现期特定时距的最大平均风速。
3.1.16 基本风压 reference wind pressure
风荷载的基准压力,一般按当地空旷平坦地面上10m高度处10min平均的风速观测数据,经概率统计得出设计基准期一遇最大值确定的风速,再考虑相应的空气密度,按贝努利公式确定的风压。
条文说明
3.1.15~3.1.16 基本风速或基本风压应由标准高度、标准地貌、平均风速的时距、最大风速的样本、最大风速的重现期以及最大风速的概率分布或概率密度曲线(线型)等多闪素确定。
3.1.17 地面粗糙度 ground roughness
风在到达结构物以前吹越过2km范围内的地面时,描述该地面上不规则障碍物分布状况的等级。
条文说明
3.1.17 地面粗糙度可分为A、B、C、D四类:A类指近海海面和海岛、海岸、湖岸及沙漠地区;B类指田野、乡村、丛林、丘陵以及房屋比较稀疏的乡镇和城市郊区;C类指有密集建筑群的城市市区;D类指有密集建筑群且房屋较高的城市市区。
3.1.18 风压高度变化系数 height variation coefficient of wind pressure
反映风压随不同场地、地貌和高度变化规律的系数。
3.1.19 风荷载体型系数 shape coefficient of wind load
反映不同形状和尺寸的建(构)筑物表面上风荷载分布的系数,为建(构)筑物表面某点的实际风压力或风吸力与自由气流形成风压的比值。
3.1.20 雷诺数 Reynolds number
流体内惯性力与黏滞阻力的比值。
条文说明
3.1.20 雷诺数是流体力学中表征黏性影响的相似准则数,无量纲。
3.1.21 涡激振动 vortex-induced vibration
当结构物上有流体作用时,就会在该结构物两侧背后产生交替的旋涡,且将由一侧向另一侧交替脱落,是由交替涡流引起且与风向垂直的振动。
条文说明
3.1.21 涡激振动具有自激、强迫和有限振幅的特点,并具有频率锁定和风速锁定特性。
3.1.22 驰振 galloping
非流线型弹性结构受流体诱发作用而产生的自激振动。
条文说明
3.1.22 驰振即在风荷载作用下结构的横风向振动现象,主要发生于细长形结构,如结冰状态的输电线、桥塔及高层建筑等。驰振为发散性自激振动。
3.1.23 颤振 flutter
弹性体在气流中发生的不稳定自激振动现象。
条文说明
3.1.23 在各种风致振动中,对建筑(如桥梁等)稳定、安全和使用性能影响最大的就是自激振动,特别是会导致建筑毁坏的颤振失稳。因此,必须绝对保证结构颤振临界风速高于颤振检验风速。当不能达到这个要求时,就需要施加有效的颤振控制措施,以改善稳定性能。
3.1.24 抖振 buffeting
边界层分离或湍流激起结构或部分结构的随机振动。
条文说明
3.1.24 抖振是由紊流风荷载作用于结构而引起的一种不可避免的强迫振动形式。不同于颤振,抖振通常不会引起结构的直接破坏,但会导致结构的功能性降低,也需要引起足够重视。
3.1.25 波浪要素 essential factors of wave
表示波浪形态和运动特征的主要物理量,一般指波高、波长、波浪周期、波速等。
条文说明
3.1.25 据统计,波浪要素的计算方法有几十种,因各种方法考虑因素的差异,使得它们的适用范围和计算精度出入很大。目前我国主要采用莆田试验站公式、官厅水库公式、鹤地水库公式、安德列扬诺夫公式等半理论半经验公式来计算波浪要素。
3.1.26 潮位 tidal level
受潮汐影响而产生周期性涨落的水位,在某一地点及某一时刻相对于基准面的高程。
3.1.27 液体自由表面波 free surface wave of liquid
液体自由表面受扰后出现的此起彼伏的波浪运动。
条文说明
3.1.27 液体自由表面是指江河湖海和开口容器中的液体等接触大气的液面。静止液体自由表面是水平的,受扰后液体质点离开其平衡位置,同时重力和表面张力发挥回复力作用,使其返回平衡位置,然后质点在惯性作用下继续向另一侧运动,从而形成液体质点的振动和因振动传播而产生的自由表面波。
3.1.28 液体自由表面进行波 free surface travelling wave of liquid
波形在空间传播的液体自由表面波,有空间和平面进行波。
3.1.29 液体自由表面驻波 free surface standing wave of liquid
波幅随时间周期性变化,波峰、波谷和其他各相位点位置不变的液体自由表面波。
条文说明
3.1.28~3.1.29 表面驻波可由两个完全相同但在相反方向传播的表面进行波叠加得到。驻波有周期性变化的波幅和固定不动的波节点。驻波的质点运动轨迹是直线,即液体质点在各自的平衡位置作直线振动,轨迹直线在波峰和波谷处是垂直于水平的,随着向波节点靠近,轨迹直线与水平的夹角逐渐变小,至波节点处变为零,成为水平。质点振动的振幅,在液体自由面上等于波幅,随质点所处自由面下深度的增加而迅速递减。
3.1.30 波浪谱 wave spectrum
反映波浪有关振动参量相对于频率分布情况的谱,包括波浪位移方差谱、波倾角谱及波数谱等。
条文说明
3.1.30 受近岸水深、岸线、海岸建(构)筑物等影响,波浪的折射、绕射、汇聚等各种效应异常显著,在海岸工程中需要分析研究不规则波浪在近岸的传播分布。为便于对不规则波进行处理,通常采用波浪谱,将不规则波浪分解为由无限多个振幅不同、频率不同、方向不同、相位杂乱的规则波组成。
3.1.31 波浪能 wave energy
海洋表面波浪所具有的动能和势能。
条文说明
3.1.31 海洋蕴藏着巨大的能量,近年来,各国科学家先后提出了多种不同设计方案,并提出了许多精妙而有趣的波能发电模型。目前波浪能发电装置的主要形式有活动点头鸭、波面筏、振荡水柱型、水流型、压力柔性袋型以及海蚌型等。
3.1.32 波浪破碎 wave breaking
波浪发生显著变形,波峰水质点水平分速达到或超过波速,使波形发生破碎的现象。
条文说明
3.1.32 波浪破碎是海洋中常见的现象,是许多海洋工程和海岸工程问题的重要影响因素。深水波浪发生破碎,会产生白浪,破碎波若遇到建(构)筑物会产生很大的冲击力。
3.1.33 浪压力 wave pressure
波浪对水工建(构)筑物产生的作用,也称波浪力。
条文说明
3.1.33 波浪产生的振动作用力会对海堤、护岸等海岸建(构)筑物造成破坏。如果波浪水体较大,则可能会形成比较大的波浪冲击压力,造成海上建(构)筑物、场地的破坏。
3.1.34 水压力 water pressure
水在静止或流动时,水体对其接触的建(构)筑物表面产生的法向作用。
3.1.35 动水压强 hydrodynamic pressure
流动水体中某点的压强。
条文说明
3.1.34~3.1.35 水压力是指水或其他液体垂直作用于其界面并指向作用面的力。界面可以是两部分液体之间的分界面,也可以是液体与固体或气体的接触面。单位面积上的压力叫做压强。按液体静止或流动区分为静水压强与动水压强。在水力学及工程学科中也有将压强称为压力。
3.1.36 压力梯度 pressure gradient
压力沿某一方向的变化率。
条文说明
3.1.36 压力梯度反映沿流体流动方向、单位路程长度上的压力变化。
3.1.37 位置水头 position head
水体中某点到基准面的高度。
条文说明
3.1.37 位置水头表征单位重量水流所具有的势能。
3.1.38 水力坡度 hydraulic gradient
水体单位流程上的水头损失,也称水力比降。
条文说明
3.1.38 水力坡度反映水流单位距离的落差。
3.1.39 近海结构振动 vibration of offshore structure
海上或者近海建(构)筑物受到风、海浪、海流以及海上平台机械设备等作用引起的振动。
条文说明
3.1.39 近海结构所处的海洋环境比较复杂,引起其振动的因素也较多。一般很难准确得到作用在近海结构上的振动荷载。近年来,专家和学者开始对近海结构的振动控制展开研究,其目的是采用一定的控制措施,减轻和抑制近海结构在各种振动荷载作用下的响应,以提高结构抵抗环境振动荷载和工作振动荷载的能力,以满足近海结构的安全性、可靠性及使用性要求。
3.1.40 风海流 wind-induced drift current
海洋中由风和海水面摩擦产生的水体流动。
条文说明
3.1.40 风荷载作用下而产生的风对海水的振动效应,其振动荷载施加在海面迎风面上,并形成稳定的海流。
3.1.41 表面重力波 surface gravity wave
在海洋流体中存在的一种以重力为恢复力的波,通常存在于两种不同流体(例如空气和海水)的分界面上。
条文说明
3.1.41 在海洋环境中,假设大气的密度均匀,且有一个自由表面,其自由表面发生扰动时,空气微团会偏离其平衡位置,产生垂直方向上的振动,扰动在水平方向上传播而形成的波动,这类波即为表面重力波。
3.2 机器振动
3.2 机器振动
3.2.1 机器振动作用 vibration effect of machine
机器在运行和工作时发生振动,对其支承结构及周边环境影响的动力效应。
3.2.2 锻锤打击力 striking force of hammer
落锤经过下落过程积蓄能量,在接触锻件瞬间释放能量产生的作用力。
3.2.3 压力机振动作用 vibration effect of press machine
压力机工作时产生的振动力。
3.2.4 往复式机器振动作用 vibration effect of reciprocating machine
往复式机器工作时,产生的往复惯性力和旋转惯性力。
3.2.5 旋转式机器振动作用 vibration effect of rotary machine
旋转式机器工作时,由于不平衡质量引起的旋转惯性力以及造成横向振动的激振扰力。
3.2.6 离心机振动作用 vibration effect of centrifuge
离心机工作时,转鼓体质量及转鼓内物料质量在旋转运动中产生的离心力。
3.2.7 冲击脉冲 shock pulse
机器作用力在短持续时间内突变,随后又迅速返回其初始值的物理量变化过程,通常冲击激励的作用时间比系统固有周期的时间小。
条文说明
3.2.7 工程振动中所说的冲击脉冲是指冲击式机器工作时,例如锻锤打击锻件的激励,压力机冲裁时,所产生的冲击脉冲作用,其脉冲的特性参数主要包括脉冲形状、脉冲宽度、脉冲幅度和重复频率等。其中相关术语概念如下:
矩形脉冲:时间历程曲线为自零开始瞬间上升到一给定值并保持脉冲期间该定值不变,随后瞬间降落到零的冲击脉冲。常见于热模锻起始阶段水平力F H 和锻压阶段竖向力F v 。
半正弦脉冲:时间历程曲线为一个周期正弦波的正半周期(或负半周期)的冲击脉冲。常见于热模锻起始阶段力矩M和摩擦螺旋竖向力F v 。
正矢脉冲:时间历程曲线为一个自零开始的正矢(正弦平方)曲线的冲击脉冲。常见于锻锤打击力Fv和热模锻起始阶段力矩M。
三角形脉冲:时间历程曲线为等腰三角形的冲击脉冲。常见于热模锻起始阶段水平力F H 和锻压阶段竖向力F v 。
梯形脉冲:时间历程曲线为自零开始线性上升到一给定值并保持一段时间该定值不变,随后线性地降落到零的冲击脉冲。
3.2.8 脉冲波形 waveform of pulse
冲击脉冲信号的形状,常见的脉冲波形有矩形、正弦半波、正矢脉冲、三角形等。
3.2.9 脉冲宽度 width of pulse
单个脉冲持续作用的时间长度。
3.2.10 脉冲峰值 peak value of pulse
单个脉冲在作用时间内的最大值。
3.2.11 脉冲函数 pulse function
以时间为自变量的振动作用分布函数,用来判断振动作用状态。
3.2.12 往复惯性力 reciprocating inertia force
活塞组件和连杆小头在活塞缸中做往复直线运动时所产生的惯性力,其方向与加速度的方向相反。分析时经常采用一阶往复惯性力和二阶往复惯性力。
3.2.13 旋转惯性力 rotational inertia force
旋转式设备由于旋转部分存在质量偏心,工作时转轴做旋转运动所产生的离心力。
3.2.14 平衡精度等级 balance accuracy grade
旋转机器转子平衡等级分为11个级别,用以检验和评估机器平衡精度。平衡精度等级可用于计算旋转式机器工作时的旋转惯性力。
条文说明
3.2.14 国际标准化组织(ISO)于1940年制定了世界公认的ISO 1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以2.5倍为增量,平衡级从要求最高的G0.4到要求最低的G4000。
3.3 交通振动
3.3 交通振动
3.3.1 列车竖向动力作用 vertical dynamic effect of train
列车运行时对轨道、桥梁等结构以及地基基础产生的竖向动力作用。
条文说明
3.3.1 交通大致可以分为陆运、海运和空运,广义上包括各种交通工具—轮船、飞机、轨道交通和橡胶轮胎车辆等,各种类型交通运输工具的振动作用包含的原理各不相同并且十分广泛,本标准中涉及的轨道交通振动作用主要是轨道交通车辆正常行驶、加速、制动、转向中施加在结构物上的力的响应。
3.3.2 列车离心力 centrifugal force of train
列车运行在曲线上产生的倾向曲线外侧的水平力。
条文说明
3.3.2 离心力和向心力都是经典力学中的重要概念。离心力是指当物体做圆周运动时,向心加速度会在物体的坐标系产生如同力一般的效果,类似于有一股力作用在离心方向,它是一种假想的惯性力,现实种不存在。而向心力是物体沿着圆周或者曲线轨道运动时的指向圆心的合外力作用力,是一种真实存在的力。本标准列车离心力特指列车运行在曲线上产生的倾向曲线外侧的水平力。
3.3.3 列车制动力 braking force of train
运行的列车制动时,对轨下结构产生的与运行方向相同的水平力。
3.3.4 列车牵引力 traction force of train
列车启动时,对轨下结构产生的与运行方向相反的水平力。
3.3.5 列车摇摆力 swing force of train
列车运行时对钢轨顶面产生的左右摇摆力。
3.3.6 轨道不平顺 track irregularity
轨道几何尺寸相对于设计位置的偏差,主要包括方向、高低、水平和轨距等。
3.3.7 长波不平顺 longwave irregularity
管理波长为数十米以上的轨道不平顺。
3.3.8 短波不平顺 shortwave irregularity
管理波长小于数米的轨道不平顺。一般由轨面的凹凸不平及轨道支承的不均匀引起。
条文说明
3.3.8 管理波长小于数米的轨道不平顺,一般小于3m。
3.3.9 钢轨波顺 rail corrugation
铁路钢轨顶面出现波浪状不均匀的磨耗现象,其实质是波浪形压溃,简称波磨。
3.3.10 机车-桥耦合振动 train-bridge coupling vibration
机车车辆与桥梁之间相互作用、相互影响的耦合振动。
3.3.11 轨道不平顺功率谱密度 power spectral density(PSD)of track irregularity
轨道不平顺信号的单边功率谱密度。
条文说明
3.3.11 轨道不平顺谱包括高低、轨向、轨距和水平四种轨道不平顺谱。采用空间频率的单边功率谱密度描述,主要用于描述轨道不平顺随机部分。
3.3.12 轨道衰减率 decay rate of track
指沿轨道方向钢轨振动幅值随距离衰减现象的参数。
3.3.13 簧下质量 unsprung mass
在车辆悬挂下方,支承于钢轨之上的单元集中质量,为车辆每轴的车轮、轮轴和轴箱等质量的总和。
3.4 施工振动
3.4 施工振动
条文说明
施工振动是研究建筑施工引起的振动,主要包括打桩、打夯、地基处理、岩土爆破等。
3.4.1 振动质量 vibration mass
参加振动的所有部件质量的总和。
3.4.2 偏心质量 eccentric mass
偏心块的质量。
3.4.3 偏心距 eccentric radius
偏心块质心到旋转中心的距离。
3.4.4 偏心力矩 eccentric moment
偏心重量与偏心距的乘积。
3.4.5 冲击质量 impact mass
冲击体的质量。
3.4.6 冲程 stroke
冲击体工作时从起点到终点所移动的距离。
3.4.7 冲击频率 impact frequency
单位时间内,冲击体往复冲击的次数。
3.4.8 冲击能量 impact energy
冲击体在规定条件下,冲击达到工作位置时所具有的能量。
条文说明
3.4.5~3.4.8 打桩设备通常利用桩锤的冲击作用将桩贯入底层。
3.5 爆破振动
3.5 爆破振动
3.5.1 爆破 blasting
利用炸药的爆炸能量对介质做功,以达到预定工程目标的作业。
条文说明
3.5.1 爆破主要用于土石方工程、建(构)筑物的拆除、军事上的破障、摧毁军事目标等,涉及爆炸材料(炸药、起爆材料及其药剂)的应用、爆破作用和爆破方法的研究以及爆破作业的组织与实施等。爆破产生的振动对周围环境和构筑物造成不利影响,爆破振动是工程上常见的振动之一。
3.5.2 爆炸 explosion
在有限空间和极短时间内,大量能量迅速释放或急骤转化的物理、化学过程并伴有强烈的机械效应。通常可分为三类:化学爆炸、核爆炸和物理爆炸。
3.5.3 粉尘爆炸 dust explosion
粉尘在爆炸极限范围内,遇到热源(明火或高温)而产生火焰并瞬间传播于整个混合粉尘空间,同时释放大量的热和形成很高的温度和很大的压力的一种化学反应。
3.5.4 爆破作用 blasting effect
炸药的爆轰产物和冲击波对介质或目标破坏的一种能力。
条文说明
3.5.4 炸药在岩土中爆炸时,一部分能量对炸药周围的介质引起扰动,并以波动形式向外传播。通常认为:在爆炸近区(药包半径的10~15倍)传播的是冲击波,在中区(药包半径的15~400倍)传播的是应力波。应力波到达界面产生反射和折射叠加形成振动波。它是一种弹性波,它包含在介质内部传播的体波和沿地面传播的面波。爆破过程中造成岩石破裂的主要原因是体波的作用,而造成爆破破坏的主要原因是面波的作用。
3.5.5 爆破地震效应 blasting seismic effect
炸药在岩土等介质中爆炸时,其中部分能量以弹性波的形式在地壳中传播而引起爆区附近地层振动的现象。
条文说明
3.5.5 爆破地震效应主要描述爆破地震波引起的破坏现象及后果,爆破地震波的特征一般用振幅A、频率f0(或周期T0)和持续时间TE三个基本参数表示。爆破地震效应是一个比较复杂的问题,受到各种因素的影响。如爆源的位置、炸药量的大小、爆破方式、传播介质和地形条件等。对建(构)筑物的破坏,爆破地震波仅是外部条件,而建(构)筑物的结构特性和材料特性是其内部条件,且与地基特性和约束条件以及施工质量等因素有关。因此,爆破地震效应是一个包含建(构)筑物本身以及爆破地震波多种因素的综合性的现象。
3.5.6 爆破振动监测 vibration monitoring for blasting
对地面周围爆破振动或者爆区附近空气压力进行持续性测量。
条文说明
3.5.6 为减小爆破地震效应的危害,需对爆破地震效应进行大量的研究。主要研究问题可以归纳为两个方面:(1)爆破地震波的特征及传播规律;(2)爆破地震波对建(构)筑物的影响。爆破振动监测是研究爆破地震效应的基本手段和方法。
3.5.7 装药量 charge mass
炸药装药的质量。
3.5.8 等效当量 equivalent
同一介质、同一距离上产生相同应力波参数峰值的两种爆炸源或爆炸方式进行当量比较时,定义其中研究比较深入的一种爆炸源或爆炸方式的当量为另一种的等效当量。通常等效为TNT的当量。
条文说明
3.5.8 TNT当量,又称爆炸当量,是一个计算单位,用于估算爆炸释放的能量,以质量为单位,通常以千克或吨来表示。
3.5.9 冲击波 shock wave
在介质中以超声速传播的并具有压力突然跃升然后缓慢下降特征的一种高强度压力波。
3.5.10 地冲击 ground shock
爆炸在岩体介质中产生的应力波所引起的冲击效应。
3.5.11 直接地冲击 direct ground shock
由爆心处直接耦合入地的能量所产生的地冲击。
3.5.12 感生地冲击 induced ground shock
空气冲击波拍击地面,在地层中引起的地冲击。
3.5.13 自由场 free field
在爆炸工程效应研究中,研究点附近没有建(构)筑物存在的区域。
3.5.14 超地震区 super-seismic zone
接近地面爆炸时,空气冲击波传播速度大于下伏地层的胀缩波速度的地表区域。
3.5.15 跨地震区 transitional-seismic zone
在超地震区以外,空气冲击波传播速度小于下伏地层的胀缩波速度而大于其剪切波速度的地表区域。
3.5.16 亚地震区 sub-seismic zone
在跨地震区以外,空气冲击波传播速度比下伏地层的胀缩波速度和剪切波速度都小的区域。
3.6 人行振动
3.6 人行振动
3.6.1 人行荷载 walking load
由人行走引起结构振动的激励荷载。
条文说明
3.6.1 人行荷载包括人群自由行走和有节奏运动引起建筑楼盖振动的荷载,也包括人行天桥构筑物的振动荷载等。
3.6.2 人群自由行走 free walking
多人参与但无固定韵律的行走活动。
3.6.3 人群有节奏运动 rhythmic motion
多人参与的、具有一定韵律的活动。
条文说明
3.6.2~3.6.3 人群自由行走发生的场合可以是汽车站、火车站、机场等候大厅以及办公楼、教学楼等具有公共用途的建筑,也可以是实验楼、洁净室等具有特殊用途的建筑,无固定韵律。人群有节奏运动一般由跳舞、演唱会、体育比赛、有氧健身操等具有一定韵律的运动引起。两者引起的工程振动比较广泛,在实际工程中,根据振动控制要求,一般考虑建筑舒适度及微振动控制(如人行引起精密设备振动)进行计算。
3.6.4 有效均布活荷载 homogeneously distributed live load
用于振动分析时楼盖上均布活荷载折减值。
条文说明
3.6.4 对于办公楼,主要考虑桌椅、文件柜等的重量;对于住宅楼,主要考虑家具等的重量,相对较轻;对于商场等大空间建筑,家具较少,有效均布荷载的数值较小。有效均布活荷载的计算可参考现行国家标准《建筑振动荷载标准》GB/T 51228。
3.6.5 人行动力因子 dynamic factor of walking
动荷载峰值与人体重量的比值。
3.6.6 人行天桥振动 footbridge vibration
一定密度的人群通过天桥时,步行激励荷载所产生的天桥振动。
条文说明
3.6.6 人行天桥的人行振动荷载应包括竖向人行振动荷载、纵桥向人行振动荷载和横桥向人行振动荷载,与人群密度及人行天桥采用的结构类型密切相关,如:钢筋混凝土结构、预应力混凝土结构、钢-混凝土组合结构及钢结构等。
3.6.7 步行频率 walking frequency
在人行天桥或结构上行走时,步行激励荷载的主频。
4 振动传播术语
4 振动传播术语
4.0.1 振源 vibration source
引发振动的扰力发生源。
条文说明
4.0.1 振源可分为:
点振源,振源可简化为一个运动质点,例如机器设备产生的振动;
线振源,振源可简化为一条直线上分布的运动质点,例如公路和轨道交通产生的振动;
面振源,由无数个等强度或不等强度的点振源组成的平面或曲面。
4.0.2 近场 near field
距振源一个波长范围内的振动场。
4.0.3 远场 far field
一般认为在十个波长范围外的振动场,可以忽略近场传播的特性。
4.0.4 弹性介质 elastic medium
在外力作用下产生形变,且可以恢复原状的介质。
4.0.5 弹性半空间 elastic half space
假定地基为均质的、各向同性的弹性半无限体。
条文说明
4.0.5 弹性半空间在一个平面中表示时称为半无限弹性体,如图2表示。
4.0.6 波动 wave motion
振动在弹性介质中的传播。
4.0.7 波动方程 equation of wave motion
自然界中波动现象的一组微分方程。
4.0.8 弹性波 elastic wave
应力波的一种,是扰动或外力作用引起的应力和应变存弹性介质中的传递形式。
4.0.9 压缩波 compression wave
介质中质点的运动方向平行于波传播方向的波。
条文说明
4.0.9 压缩波又称为体波、纵波,典型的有P波、爆炸产生的冲击波。 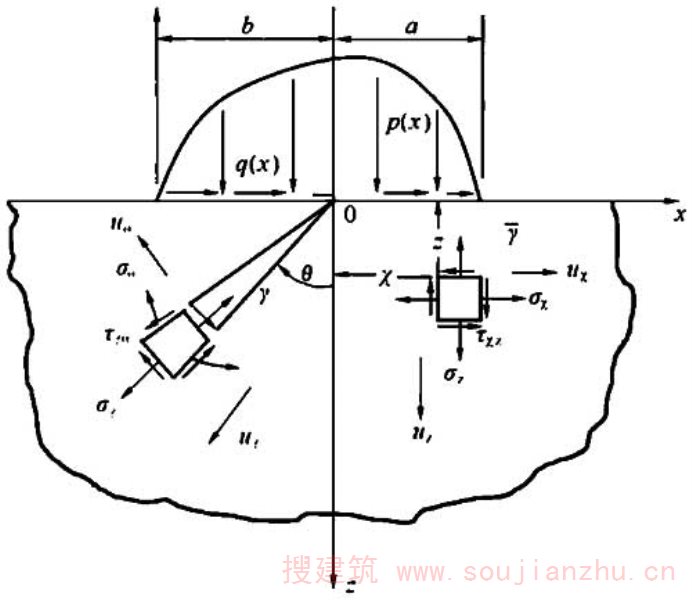 图2 弹性半空间示意图
图2 弹性半空间示意图
4.0.10 剪切波 shear wave
介质中质点的运动方向垂直于波传播方向的波。
条文说明
4.0.10 剪切波又称为面波、横波,典型的有瑞利波、勒夫波。
4.0.11 瑞利波 Rayleigh wave
沿半空间弹性介质自由表面传播的偏振波。
4.0.12 等效剪切波速 equivalent shear wave velocity
在地面以下一定深度范围内的覆盖层剪切波的传播速度。
条文说明
4.0.12 是指在地面以下20m深范围内或小于20m的覆盖层土层剪切波的传播速度。
4.0.13 多普勒效应 Doppler effect
波长因为振源和观测者的相对运动而产生变化的一种现象。
4.0.14 驻波 standing wave
频率相同、传播方向相反的两种振动叠加形成的振幅空间分布固定不变的波。
4.0.15 拍振 beat vibration
两个频率相近、幅值相近的正弦振动信号叠加,所形成的时强时弱的振动。
条文说明
4.0.15 拍振是指一质点同时参与两个同方向、不同频率简谐运动,则t时刻位移分别为:
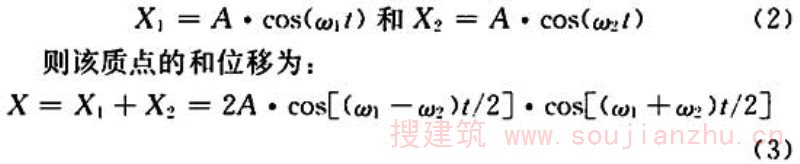
图3是两个信号的叠加。这样时强,时弱的信号即是拍。这样的信号可以是任何形式的信号,如结构的振动信号,地磁波的振荡信号,声音等。事实上,“拍”这个名词是来源于音乐方面的术语。
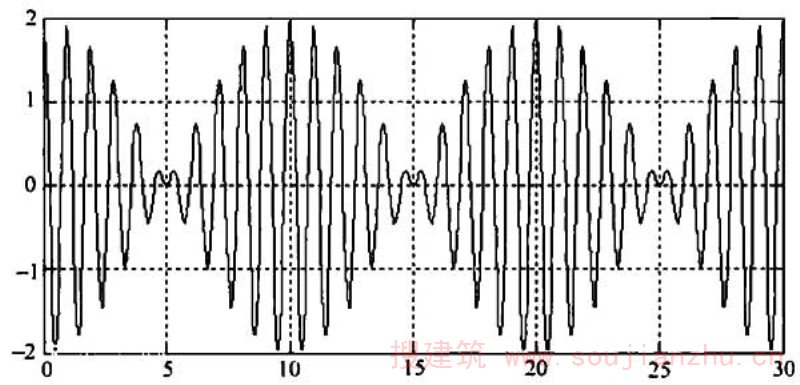
图3 两个信号的叠加
4.0.16 振动衰减 vibration attenuation
振动随传递路径的影响,波的能量随着离开振源的距离逐渐减小的现象。
4.0.17 防振距离 vibration-proof distance
使振源振动对防振对象不产生有害影响的最小距离。
条文说明
4.0.17 防振距离通常是规划设计中要考虑的指标之一,是指振源产生的振动经设备基础和土介质向外传播而逐渐衰减,当达到一定距离后,在不采取任何防振措施的情况下传来的地面振动已不能影响防振对象的距离。国家标准《电子工业防微振工程技术规范》GB 51076-2015给出了防振距离计算公式,国家标准《动力机器基础设计规范》GB 50040-96给出了振动在地基土中衰减估算方法。
4.0.18 衰减系数 attenuation coefficient
传播系数的实数部分,又称衰减常数。
4.0.19 传播系数 propagation coefficient
描述振动波在传播方向幅度和相位随距离变化的系数。
4.0.20 传递阻抗 transfer impedance
介质阻尼产生的、影响振动波向外传播的阻力。
5 振动分析术语
5.1 振动参数
5 振动分析术语
5.1 振动参数
5.1.1 频率 frequency
质点在单位时间内做周期运动的次数,单位为赫兹(Hz)。
5.1.2 角频率 angular frequency
单位时间内变化的相角弧度值,又称圆频率。
5.1.3 固有频率 natural frequency
由系统本身质量、刚度和边界条件所决定的振动频率。
5.1.4 基频 fundamental frequency
振动系统最小的固有频率。
5.1.5 阻尼固有频率 damped natural frequency
阻尼线性系统自由振动的频率。
条文说明
5.1.5 单自由度无阻尼线性系统的固有频率为 ,单自由度阻尼线性系统的固有频率为
,单自由度阻尼线性系统的固有频率为 。因此,阻尼线性系统的固有频率小于无阻尼线性系统的固有频率。
。因此,阻尼线性系统的固有频率小于无阻尼线性系统的固有频率。
5.1.6 非线性阻尼 non-linear damping
与振动速度不成线性关系的阻尼。
5.1.7 线性阻尼 linear damping
与振动速度成线性关系的阻尼,又称黏滞阻尼。
5.1.8 线性阻尼系数 linear damping coefficient
线性阻尼力与速度之比。
5.1.9 库仑阻尼 Coulomb damping
当振动系统中的质点受到大小与位移和速度无关,而方向与质点速度相反的力的阻碍时而发生的能量耗散。
5.1.10 振型 modal shape of vibration
系统以特定的频率做简谐振动时各点所呈现的运动形态,又称“模态”。当系统做固有振动时,其振型称为“固有振型”或“固有模态”。
5.1.11 振动模态 vibration mode
系统中每个质点做相同频率的简谐振动时的特征模式。一个多自由度系统的模态数等于其自由度数。
5.1.12 自功率谱密度 self-power spectrum density
每单位带宽的极限均方值(如加速度、速度、位移、应力或其他随机变量的极限均方值),对于一个给定的矩形带宽,当带宽趋于零时均方值除以带宽的极限值,也称为功率谱密度。
条文说明
5.1.12 自功率谱密度表征能量按频率的分布情况。自功率谱密度函数曲线下面的面积等于振动量在τ等于零时的自相关函数。如果信号可以看作是平稳随机过程,那么自功率谱密度和自相关函数互为傅里叶变换对。
5.1.13 临界转速 critical rotation speed
与旋转系统共振频率相对应的转动速度。
5.1.14 波长 wave length
两相邻波峰(或波谷)间的水平距离。
5.1.15 波形因数 waveform factor
在两个相继过零的半循环中,其均方根值(有效值)与均值之比。
5.1.16 振动位移 vibration displacement
物体相对于某一参考坐标位置变化的矢量。
5.1.17 振动速度 vibration velocity
单位时间内振动位移的变化量。
5.1.18 振动加速度 vibration acceleration
单位时间内振动速度的变化量。
5.1.19 宽频带随机振动 wide band random vibration
频率成分分布于宽频带内的随机振动。
条文说明
5.1.19 宽频带的界定是相对于所讨论的问题而言的,其宽度通常等于或者大于一个倍频程。
5.1.20 谐波 harmonic wave
频率为基频或基频之整数倍的正弦波。
5.1.21 对数衰减率 logarithmic decrement
单自由度系统在阻尼固有频率振动时,任意两个相继的振动量最大值之比的自然对数。
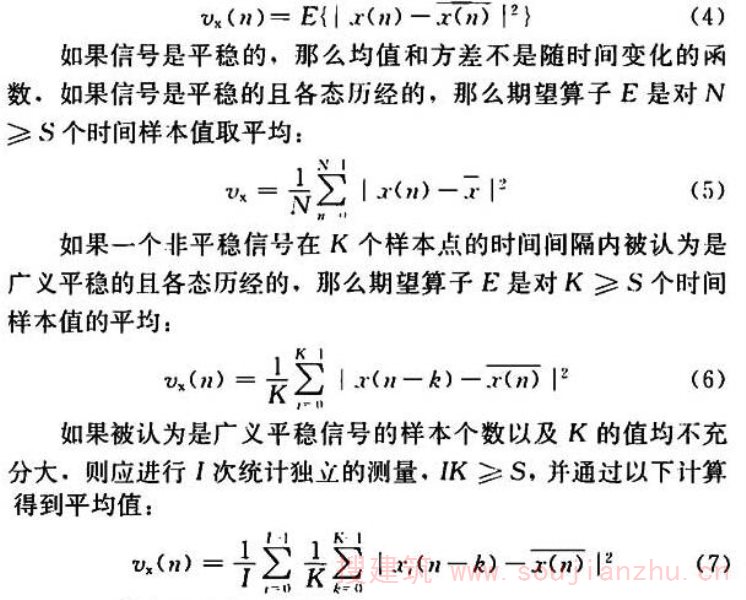
5.1.22 方差 variance
用以衡量随机变量或一组数据的离散程度,可取随机变量与其平均值之差的二次方的平均值。
条文说明
5.1.22 方差也称为随机变量的二阶矩,其定义为:
5.1.23 协方差 covariance
用来衡量两个变量的总体误差的度量值。这两个变量可以为不同振动信号,也可为同一振动信号的不同时间延迟,分别称为这两个变量的互协方差和自协方差。
条文说明
5.1.23 协方差的定义如下:
5.1.24 倍频程 octave
上限频率与下限频率之比是2的某次方时,称该频带是某次倍频程。
条文说明
5.1.24 使用频率?与基频 之比等于2的n次方,即
之比等于2的n次方,即 =2n。则?称
=2n。则?称 的n次倍频程。
的n次倍频程。
5.2 振动分析
5.2 振动分析
5.2.1 时域分析 time domain analysis
把信号作为时间的函数来分析,主要反映信号的幅度随时间变化的情况,时域分析的结果可以反映信号的峰值信号、上升时间和周期等专门信息。
5.2.2 频域分析 frequency domain analysis
把信号作为频率的函数来分析,主要反映在所研究的信号频谱内,各个频率下能量的幅度和相对相位。频域分析的结果可以反映信号的频率、谐波、失真、频率稳定度、频谱纯度以及寄生信号等专门信息。
条文说明
5.2.1~5.2.2 时域分析与频域分析是对模拟信号的两个观察面。时域分析是以时间轴为坐标表示动态信号的关系;频域分析是把信号变为以频率轴为坐标表示出来。动态信号从时间域变换到频率域主要通过傅里叶级数和傅里叶变换实现。周期信号可由傅里叶级数实现,非周期信号可由傅里叶变换实现。
根据傅里叶变换和逆傅里叶变化的两个算式,已知时间函数f(t)可唯一求出它的频率函数F(w)(频谱),反之亦然。以上两式一一对应,可称为一对傅里叶变换。
5.2.3 模态分析 modal analysis
基于叠加原理的近似分析方法,用结构系统自身的振动模态,即固有频率、模态阻尼和模态振型求解振动反应的一种方法。
条文说明
5.2.3 模态分析过程如果是由有限元计算的方法取得的,则称为计算模态分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。
5.2.4 傅里叶变换 Fourier transform
将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合。
条文说明
5.2.4 傅里叶变换是基于傅里叶原理而来,即:任何连续测量的时序或信号,都可以表示为不同频率的正弦波信号的无限叠加。
振动数据x(t)可展开为傅里叶级数,一定条件下,可表示为下式:
5.2.5 离散傅里叶变换 discrete Fourier transform
傅里叶变换在时域和频域上都呈现离散的形式,将时域信号的采样变换为在离散时间傅里叶变换频域的采样。
条文说明
5.2.5 一种数学变换方法。某有限时域序列 的离散傅里叶变换
的离散傅里叶变换 定义为:
定义为:

5.2.6 快速傅里叶变换 fast Fourier transform(FFT)
利用计算机计算离散傅里叶变换(DFT)的高效、快速计算方法的统称。
条文说明
5.2.6 快速傅里叶变换(FFT)能够将计算离散傅里叶变换(DFT)的复杂度从只用DFT定义计算需要的O(n2)降低到O(nlogn)。FFT和DFT是等效的。
5.2.7 谐响应分析 harmonic response analysis
主要用于确定线性结构在承受随时间按正弦(简谐)规律变化的载荷时的稳态响应,其目的在于计算出结构在几种频率下的响应值(通常是位移)对频率的曲线。
条文说明
5.2.7 对于承受随时间变化简谐外力的结构,其动力学方程为:
对于每一个节点的位移,可以有两种输出形式,即实部和虚部的输出形式及幅值和相位角的输出形式。
谐响应分析方法有完全法、缩减法及模态叠加法。
5.2.8 模态坐标 modal coordinates
利用其正交特性实现其振动系统参数解耦的坐标系。
条文说明
5.2.8 根据模态的正交性,可以证明模态之间是线性无关的。因此,n自由度系统的n个模态构成n维向量空间的一组正交基,于是n维空间的任意一个向量x都可以用这组正交基来表示。以该正交基作为基底的坐标系称为模态坐标系,因此有: 
上式中,列向量q称为模态坐标,也可以称为模态位移,其元素qi称为系统的模态坐标或主坐标。上式实现了模态坐标q与物理坐标x之间的转换,模态矩阵Φ也称为坐标转换矩阵。
5.2.9 模态参数 modal parameter
模态的特征参数,即振动系统的各阶固有频率、振型、模态质量、模态刚度与模态阻尼。
条文说明
5.2.9 模态参数是结构固有的一种特性,它只与结构的质量、刚度、约束形式等有关,而与其他输入无关。 对于质量矩阵M,刚度矩阵K的n自由度无阻尼线性系统,其广义特征值问题为: 
把任意一个特征值λi代入齐次方程就可以得到与之对应的特征向量φi。特征向量φi表征了各个坐标在以固有角频率wi做简谐振动时各个坐标幅值的相对大小,称之为系统的第i阶固有模态或固有振型。n自由度线性系统含有n个模态,且各阶模态应满足双正交性。 把求得的n个特征向量也就是n个模态按列排列,组成的矩阵Φ称为模态矩阵。
5.2.10 频率分析 frequency analysis
用于数学、物理学和信号处理中,可获得函数、波形或者信号的频率组成,以确定频谱的方法。
5.2.11 频率分辨率 frequency resolution
进行离散傅里叶变换时可将两个相邻谱峰分开的能力,表现为频率轴上所能得到的最小频率间隔。
条文说明
5.2.11 频率分辨率可以理解为在应用离散傅里叶变换(DFT)时,所得到的频谱图中相邻谱线的最小频率差,即: 
式中,△f为频率分辨率,fs为采样频率,N为采样点数,△t为采样间隔,所以N△t就是采样前模拟信号的时间长度T,因此信号长度越长,频率分辨率越好,如果要提高频率分辨率,可在不改变采样频率fs时,增加数据采样点数N。
5.2.12 傅氏级数 Fourier series
连续周期信号分解为一组正弦波的组合,用来表达正弦波间幅度和相位关系的数学公式。
5.2.13 振动系统识别 vibration system identification
用试验与数学分析相结合的方法确定系统数学模型的过程,该模型应反映系统的实际振动特性。求取模态参数、建立模态参数模型的过程为模态参数识别,为结构动力学系统识别中的常用方法。
条文说明
5.2.13 振动系统识别可分为频域法、时域法、时-频方法及基于模拟进化的方法四大类。
5.2.14 幅值分析 amplitude analysis
用来确定振动幅值随时间变化的分析方法。
5.2.15 统计分析 statistical analysis
为了确定信号的各种时间函数的统计特性,运用数学统计方法,从定量与定性的结合上进行分析的方法。
5.2.16 概率分布函数 probability distribution function
表示一个随机变量取给定值或属于某给定值的概率所确定的函数。简称概率分布或分布。
条文说明
5.2.16 对于一维实随机变量X,设它的累积分布函数是FX(x)。如果存在可测函数fX(x),满足: 
5.2.17 概率密度函数 probability density function
概率分布函数的微商(导数),简称密度函数或密度。
条文说明
5.2.17 连续随机变量X的概率密度函数为:
式中f(x)是随机变量X的全部可能值中落在x与x+dx的相对比率。
5.2.18 相关分析 correlation analysis
研究变量之间是否存在某种依存关系,并对具体有依存关系的变量探讨其相关方向以及相关程度的一种统计方法。
条文说明
5.2.18 振动相关分析是通过将某个时刻的振动值与另一个时刻的振动值进行比较,以确定一个独立的平稳振动时间历程的某些特征或多个不同的平稳时间历程间关系的一种方法。如果信号是随机的并且是平稳的,那么相关性仅和时间差有关。如果信号是随机的并且是非平稳的,那么相关性与每一个时间点都有关。
5.2.19 自相关函数 self-correlation function
用于定量地确定信号在任意不同时刻的取值之间的差别或相似程度的方法。
条文说明
5.2.19 对于非平稳信号,自相关函数是信号在时间n和延迟k时的乘积的平均值:

其中,平均是对各独立的数据块取。参与平均的数据块数目一定要充分大。
其中,—L+1≤k≤L—1;p=max(0,k);q=min(L—1,L—1+k)。
数据长度L必须足够长,才能使(q—p+1)的平均在统计上是充分的。
5.2.20 自相关系数 self-correlation coefficient
一个量的自相关函数与其均方值之比。
5.2.21 互相关函数 cross-correlation function
用于表述两个时间序列之间的相关程度的函数。
条文说明
5.2.21 对于非平稳的信号,互相关函数是信号在时间n和延迟k时的乘积的平均值:
其中,—L+1≤k≤L—1;p=max(0,k);q=min(L—1,L—1+k);
数据长度L必须足够长,才能使(p—q+1)的平均在统计上是充分的。
5.2.22 互相关系数 cross-correlation coefficient
两个量的互相关函数与各自的均方值乘积的平方根之比。
5.2.23 相干函数 coherence function
两个振动信号在各频率成分上的线性相关程度。
条文说明
5.2.23 对于由能量谱密度表示的信号,其相干函数为:

5.2.24 短时傅里叶变换 short-time Fourier transform
一种固定时间窗的时频分析方法,其基本思想是用窗函数来截取信号,假定信号在窗内是平稳的,采用傅里叶变换分析窗内的信号,以确定窗内存在的频率成分,然后沿着信号时间方向移动窗函数,得到频率随时间的变化关系,即所需要的时频分布。
条文说明
5.2.24 信号的短时傅里叶变换由以下公式给出:

其中,含有K个样本的窗函数w应事先指定。时间指数n可从1开始增加,范围通常取窗的长度K或一半的长度K/2。
短时傅里叶变换不能兼顾频率与时间分辨率的需求,使用长时间滑动窗,在频域获得高精度,但时域精度降低;反之,使用短时间滑动窗,在时域获得高精度,又会使频域精度降低。
5.2.25 小波变换 wavelet transform
一种多分辨分析的时频分析方法,通过伸缩平移运算,针对高频、低频信号分别采用窄时窗和宽时窗,对信号逐步进行多尺度细化,最终达到高频处时间细分,低频处频率细分,从而可聚焦到信号的任意细节。
条文说明
5.2.25 信号x(t)的连续小波变换表示为:
多分辨分析是为了平衡时间分辨率和频率分辨率这个矛盾,采取的对存在高频分量的部分采用高的时间分辨率和低的频率分辨率,而对于低频分量则采用高的频率分辨率和低的时间分辨率的分析方法。
5.2.26 魏格纳分布 Wigner distribution
一种双线性形式的时频分布,可用信号的二次时频进行表示,又称Wigner-Ville分布,具有较高的时频分辨率。
条文说明
5.2.26 信号x(t)的魏格纳分布定义为:

5.2.27 平稳过程 stationary process
统计特性呈现不随时间推移而改变的随机过程。
条文说明
5.2.27 平稳过程,又称严格平稳过程或强平稳过程是一种特殊的随机过程。如果有一个信号χ对于所有κ都满足以下条件。则它就是一个平稳过程:

也就是说,x[m]和x[n]的联合概率分布,只和m和n的时间差有关,和其他参数都没有关系。
5.2.28 信号处理 signal processing
对各种类型的信号,按各种预期的目的及要求进行加工过程的统称。
5.2.29 采样 sampling
以一定时间间隔,将连续信号转换成离散信号的过程。
条文说明
5.2.29 在信号处理领域,采样是将信号从连续时间域上的模拟信号转换到离散时间域上的离散信号的过程,以采样器实现。通常采样与量化联合进行,模拟信号先由采样器按照一定时间间隔采样获得时间上离散的信号,再经模数转换器(ADC)在数值上也进行离散化,从而得到数值和时间上都离散的数字信号。很多情况下所谓的“采样”就是指这种采样与量化结合的过程。通过采样得到的信号,是连续信号的离散形式。连续信号通常每隔一定的时间间隔被模数转换器(ADC)采样,时间点上的连续信号的值被表现为离散的,或量化的值。
5.2.30 模数转换 analogue-to-digital conversion
将模拟信号通过采样和量化处理转换成数字序列的过程。
5.2.31 数模转换 digital-to-analogue conversion
将离散的数字序列转换为连续变化的模拟信号的过程。
5.2.32 混叠 aliasing
对连续信号进行等间隔采样时,如果不能满足采样定理,采样后信号的频率就会重叠,即高于采样频率一半的频率成分将被重建成低于采样频率一半的信号,频谱的重叠导致了信号的失真。
条文说明
5.2.32 混叠主要来自于对连续时间信号做取样以数字化时,取样频率低于两倍奈奎斯特频率。在统计、信号处理和相关领域中,混叠是指取样信号被还原成连续信号时产生彼此交叠而失真的现象。当混叠发生时,原始信号无法从取样信号还原。而混叠可能发生在时域上,称作时间混叠,或是发生在频域上,称作空间混叠。
5.3 振动响应
5.3 振动响应
5.3.1 谐波响应 harmonic response
振动系统处于激励频率倍频时显示出的共振特征的周期响应。
5.3.2 瞬态响应 transient response
系统在某一典型信号输入作用下,其系统输出量从初始状态到稳定状态的变化过程。
5.3.3 稳态响应 steady response
系统在激励的持续作用下所进行的不衰减的等幅振动,通常指系统对简谐干扰力和一般周期性干扰力的响应,前者是频率等于干扰力频率的简谐振动;后者是若干个不同频率的简谐振动的叠加。
5.3.4 传递函数 transfer function
零初始条件下,线性系统响应(输出)的拉普拉斯变换(或z变换)与激励(输入)的拉普拉斯变换(或z变换)之比。
条文说明
5.3.4 通常传递函数是一个复变函数,定义为线性时不变系统输出与输入的拉普拉斯变换之比。传递函数通常以频率函数的形式给出,且为复变函数。传递函数是指零初始条件下线性系统响应(即输出)量的拉普拉斯变换(或z变换)与激励(即输入)量的拉普拉斯变换(或z变换)之比。
5.3.5 频率响应函数 frequency response function
线性系统中,以频率为自变量的振动响应的傅里叶变换与激励的傅里叶变换之比,简称频响函数。
条文说明
5.3.5 激励可以是时间的简谐、瞬态或随机函数。简谐激励时,为稳态输出量与输入量之比,瞬态激励时,输出的傅里叶变换与输入的傅里叶变换之比,平稳随机激励时,输出和输入的互谱与输入的自谱之比。
运动可以用速度、加速度或位移来表示,其相应的频响函数分别为导纳、加速度导纳和位移导纳,或分别为阻抗、有效质量(即视在质量)和动刚度。
频响函数是线性定常系统的固有特性,它与输入函数的类型无关,一种激励形式下获得的结果能够用于预测系统对其他任意形式激励的响应。
5.3.6 谱 spectrum
将一个量作为频率或波数的函数的描述。
5.3.7 连续谱 continuous spectrum
谱分量连续分布在某一频率范围内的谱。
5.3.8 幅值谱 amplitude spectrum
将傅里叶变换所得的复函数的模作为频率的函数来描述的频谱。
5.3.9 相位谱 phase spectrum
将傅里叶变换所得的复函数的相位角作为频率的函数来描述的频谱。
5.3.10 能量谱密度 energy spectral density
单位频带内的信号能量。
条文说明
5.3.10 对于一个确定性非平稳瞬态信号,其能量谱密度为:
5.3.11 功率谱密度 power spectral density(PSD)
是一种概率统计方法,是对随机变量均方值的量度。一般用于随机振动分析,连续瞬态响应只能通过概率分布函数进行描述,即出现某水平响应所对应的概率。
条文说明
5.3.11 功率谱密度的计算公式如下:

这里平均是在一个长的时间记录中对不同的时间段求得。功率谱密度的单位是W/Hz。如果信号是非各态历经的,则期望值需对整个独立数据块求得。
功率谱密度是一个通用术语,使用时不考虑时间历程所代表的物理过程。对于涉及的物理过程,根据特定的数据加以说明。例如,当描述加速度谱时,用“加速度功率谱密度”或“加速度谱密度”术语来代替功率谱密度。
5.3.12 互功率谱密度 cross-power spectral density
两信号在频率内关系的量值,简称互谱密度。
条文说明
5.3.12 对于用能量谱密度表示的信号,其互谱密度为:
互谱密度是复数,其幅值和相位可表示为频率的复函数。
5.3.13 冲击响应谱 shock response spectrum
一系列均匀阻尼的单自由度系统对施加的冲击输入的最大响应。
条文说明
5.3.13 冲击响应谱是一般性术语,需要附加修饰词使其含义明确,比如加速度、速度或位移冲击响应谱。
如果没有给定系统阻尼的大小和类型,就假定为无阻尼。除非另外说明,冲击响应为最大绝对值,它与最大值的符号和出现的时刻无关。该响应经常被称为最大冲击响应谱。若提及的是其他类型的冲击响应谱,则需要特别说明。
5.3.14 机械阻抗 mechanical impedance
线性定常机械系统中简谐激振力与简谐运动响应两者的复数式之比。
条文说明
5.3.14 机械阻抗为复数或复矢量。机械阻抗根据所选取的运动量可分为位移阻抗(又叫动刚度)、速度阻抗和加速度阻抗(又叫有效质量)三种。

5.3.15 角机械阻抗 angular mechanical impedance
扭矩与角速度之比的阻抗,又称转动机械阻抗。
5.3.16 机械导纳 mechanical admittance
机械阻抗的倒数。
条文说明
5.3.16 机械导纳可以表示为:

机械阻抗的幅值与机械导纳的幅值互为倒数,但它们的相位角数值相同,仅相差一个负号。
5.3.17 放大系数 magnification factor
输出变化量与输入变化量之比,又称增益。
5.3.18 均方根值速度谱 root mean square(RMS)velocity spectrum
均方根速度随中心频率变化而形成的均方根谱。
5.3.19 传递比 transmissibility
振动系统在稳态受迫振动时,响应幅值与外加激励幅值的比值,又称传递率。
条文说明
5.3.19 传递比可以是力、位移、速度或加速度的比。可用于度量隔振器的效率。它与阻尼比、固有频率和激励频率有关。
5.4 振动评价
5.4 振动评价
5.4.1 振动加速度级 vibration acceleration level
加速度与基准加速度之比,并以10为底的对数乘以20。
条文说明
5.4.1 振动加速度级的计算方法为:

式中:a——振动加速度有效值,m/s2,
a0——基准加速度,10-6m/s2。
5.4.2 Z振级 Z vibration level
全身振动Z计权因子修正后得到的振动加速度级。
5.4.3 累计百分之十Z振级 cumulative ten percent Z vibra-tion level
在规定的测量时间内,有10%时间的Z振级超过某一VL z10 值,这个VL z10 值叫作累积百分之十Z振级。
条文说明
5.4.3 累计百分之十Z振级为测量无规振动的评价量。连续测量时间不应少于1000s。
5.4.4 最大Z振级 maximum Z vibration level
在测量时间内所出现的Z振级的最大值。
条文说明
5.4.4 最大Z振级为测量冲击振动和铁路振动的评价量。对冲击振动而言,应以10次冲击的最大Z振级的算数平均值为评价量。对铁路振动而言,应为20次列车通过的最大Z振级的算数平均值为评价量。
5.4.5 分频最大振级 frequency division maximum vibration level
全身振动Z计权因子修正后得到的各1/3倍频程中心频率上的最大振动加速度级。
条文说明
5.4.5 分频最大振级是城市轨道交通引起建(构)筑物振动的评价量,所采用的频率范围是4Hz~200Hz的1/3倍频程。
6 振动影响术语
6.1 人体舒适影响
6 振动影响术语
6.1 人体舒适影响
6.1.1 人体舒适性 human comfort
人体对所暴露的振动环境,主观状态良好,在身体或心理上没有感到困扰和不安的程度。
6.1.2 等振感曲线 equal vibration sensation contour
以频率为函数表示的,振动感觉大小相等的一组振动值。
6.1.3 敏感点 sensitive point
某区域内对环境振动噪声控制要求较高的单体建(构)筑物以及对振动或噪声控制要求特别高的特殊建(构)筑物。
6.1.4 敏感区 sensitive area
对环境振动噪声控制要求较高的区域。
6.1.5 振动限度 vibration limit
根据特定的准则推荐的振动与冲击的最大强度或烈度的定量表达。
条文说明
6.1.5 其中特定的准则,例如,当准则是防止伤害或疾病时,为安全暴露界限。关于人体暴露于机械振动和冲击的标准通常规定了人体响应的评价方法,而在有些场合,已经给出了专门的剂量反应关系。作为一般规则,规定绝对的暴露限度对于国际标准而言是不合适的。在有些成员国中,振动(冲击)限度有时由立法或行政机构颁布。在这种情况下,宜鼓励使用同国际上认可的或同类国家一致的评价方法和数据。
6.1.6 暴露时间 exposure time
暴露于振动作用下的时间。
6.1.7 工作时间 work time
由一天内开始和结束时刻确定的振源活动周期或作用时间。
6.1.8 全身振动 whole-body vibration
传向整个人体的振动或冲击,通常是通过与振动或受冲击运动的支撑表面相接触的人体区域传递,又称全身冲击。
条文说明
6.1.8 其中人体区域,例如臀部、脚底、背部。
6.1.9 局部振动 segmental vibration
施加于或传递到人体某一特定局部、区域或部位的振动或冲击,又称局部冲击。
条文说明
6.1.9 人体某一特定局部、区域或部位,例如手臂系统或头部(通常用来区别于全身振动)。
6.1.10 方向性振动 directional vibration
作用于人体全身或局部的直线或旋转振动或冲击,又称方向性冲击。
条文说明
6.1.9 人体某一特定局部、区域或部位,例如手臂系统或头部(通常用来区别于全身振动)。
6.1.11 振动准则 vibration criterion
以规定人体振动或冲击的限度或界限为目的的准则,又称冲击准则。
条文说明
6.1.11 人体振动(冲击)的限度或界限如保护健康、工作效率,作为完整的表达,准则应规定被保护人群的比率或百分数。
6.1.12 振动耐限 vibration tolerance
按规定振动冲击或撞击准则得出个体或者特定人群或组中的平均可耐受最大的振动冲击或撞击的烈度,又称冲击耐限或撞击耐限。
6.1.13 疲劳与熟练程度降低 fatigue and decreased proficiency
由振动或冲击引起人的疲劳导致活动能力或工效降低,又称疲劳或熟练程度降低。
条文说明
6.1.13 该术语体现两个意义,因为一方面它是一个不被人类工效生理方面的专家普遍接受和承认的概念,而另一方面,它已在国际标准和同类文献中采用。“熟练程度”(proficiency)一词收入本标准在某些方面是一种不得已的选择,因为在规范的英语用法中,严格地说,它的含义指未必有当前正在执行的任务的效率(efficiency)的意思(效率同时可能被振动或冲击运动降低),但同时可获得技能或经验,这个术语主要是由受过训练的个人使用,但没有考虑暂时的不良环境因素的作用。
该术语在科技文献甚至在一些英文版的生物动力学标准中被广泛不适当地写成“疲劳-降低熟练程度”(不推荐这种代替方式)。使用这种连字符的形式错误地表示全部的工效被“疲劳”降低,即被依赖于时间的振动或冲击运动的不利生理作用所降低。事实上,人的许多形式的活动和工效,是在被振动或冲击运动引起的直接机械干扰瞬时降低,而未必是与在持续暴露期间的任何后续生理上的疲劳影响有关。
6.1.14 间断性暴露 interrupted exposure
被具有特定时间过程的无振动期中断的人体的准稳态或连续性振动暴露。
条文说明
6.1.14 特定时间过程指发生次数与持续时间;人体的准稳态或连续性振动暴露通常出现在职业性手传性振动场合。
6.1.15 长时间振动暴露 long-duration vibration exposure
作用于人体且持续1h以上的连续振动。
6.1.16 影响人体的机械振动猝发 burst of mechanical vibra-tion affecting human
在人体或人体局部的驱动点的一系列离散且连续的振动变换。
条文说明
6.1.16 影响人体的振动猝发的典型情况包括在人体共振系统受到冲击输入后引发的振幅按指数规律衰减(通常为“钟形”)的准谐波振动,或是幅值包络线起伏的振动(例如,由重型车辆通过而激发的桥面振动),或是短暂的随机振动,如同飞机对孤立的一阵空气紊流响应或船在波浪巨大的海中航行引起的船体响应一样。
猝发通常是与大多数人体反应相关的短暂时间。振动猝发的持续时间足够长到能作为短时间连续振动处理的关键将依赖于环境和引起的人体响应。
6.1.17 影响人体的间歇性振动 intermittent vibration affect-ing human
为间歇所分隔的若干段重复性连续振动,间歇期间振动停止或在幅度和(或)特性上有明显变化。
条文说明
6.1.17 一种振动突然或无规律的恢复,因而可能引起作为振动接收器的人的吃惊和烦恼。
6.2 振敏设备影响
6.2 振敏设备影响
6.2.1 失效 invalidation
机械零件、机械装置或机械系统由于某些原因失去原定设计功能的现象。
条文说明
6.2.1 例如产品良品率下降,设备装置和仪器精度降低、运行故障提高、加工精度下降、计量不准等。
6.2.2 机械损伤 mechanical damage
机械系统正常工作时,各构件因机械摩擦、碰撞等因素产生的损伤。
6.2.3 工作频率 operating frequency
机械系统正常工作时产生的振动频率。
6.2.4 位移共振 displacement resonance
当外部激励频率接近动力系统某阶固有频率时,位移值达到极大值的现象。
条文说明
6.2.4 对应位移振幅极大值的频率为位移共振频率。对于固有频率为w0,阻尼比为ζ的单自由度系统,位移共振频率为:

有阻尼系统的位移共振频率wr小于固有频率w0。对应于共振频率的动力放大系数为:

6.2.5 速度共振 velocity resonance
当外部激励频率接近动力系统某阶同有频率时,速度值达到极大值的现象。
条文说明
6.2.5 速度共振频率等于系统的固有频率w0。
6.2.6 共振频率 resonance frequency
系统发生共振的频率。
6.2.7 机械寿命 mechanical life
系统从开始投入使用时起,直到因系统功能丧失而退出使用的时间长度。
6.3 建筑结构影响
6.3 建筑结构影响
6.3.1 恢复力 restoring force
结构发生弹性变形时产生的反作用力。
条文说明
6.3.1 恢复力的受力方向一般指向平衡位置,并使物体回到平衡位置。
6.3.2 惯性力 inertial force
物体有加速度时,惯性使物体保持原有运动状态的倾向,若以该物体为参照系,好像有一方向相反的力作用在该物体上,该虚拟作用力称之为惯性力。
条文说明
6.3.2 惯性力是指当物体有加速度时,物体具有的惯性会使物体具备保持原有运动状态的倾向,而此时若以该物体为参考系,并在该参考系上建立坐标系,看起来就仿佛有一股方向相反的力作用在该物体上,令该物体在坐标系内有发生位移的趋向,因此称之为惯性力。
6.3.3 主应力 principal stress
物体内任一点剪应力为零的主截面上的正应力,对三维系统存在三个正交的主应力。
条文说明
6.3.3 主应力指的是物体内某一点以法向量的微面积元上剪应力为零时的正应力。这时,法向量的方向称为主应力方向。
6.3.4 应变 strain
变形量与长度之比。
6.3.5 线应变 linear strain
作用引起的结构或构件中某点单位长度上的拉伸或压缩变形。前者称拉应变,后者称压应变,对应于正应力的线应变亦称正应变。
6.3.6 剪应变 shear strain
作用引起的结构或构件中某点处两个正交面夹角的变化量,也称切应变。
6.3.7 主应变 principal strain
作用引起的结构或构件中某点处与主应力对应的最大或最小正应变。当为拉应变时称主拉应变,当为压应变时称主压应变。
6.3.8 极限应变 ultimate strain
材料受力后对应于最大应力的应变。
条文说明
6.3.4~6.3.8 结构或构件在受到外力作用下会产生一定的变形,变形的程度体现的意义即为应变。应变有线应变、剪应变和主应变,材料受力后对应于最大应力的应变称为极限应变。
6.3.9 位移 displacement
作用引起的结构或构件中某点位置的改变,或某线段方向的改变。前者称为线位移,后者称为角位移。
6.3.10 挠度 deflection
在弯矩作用平面内,结构构件轴线或中面上某点由挠曲引起垂直于轴线或中面方向的线位移。
条文说明
6.3.10 细长物体(如梁或柱)的挠度是指在变形时其轴线上各点在该点处轴线法平面内的位移量。薄板或薄壳的挠度是指中面上各点在该点处中面法线上的位移量。物体上各点挠度随位置和时间变化的规律称为挠度函数或位移函数。
6.3.11 变形 deformation
作用引起的结构或构件中各点间的相对位移。
6.3.12 弹性变形 elastic deformation
作用引起的结构或构件的可恢复变形。
6.3.13 塑性变形 plastic deformation
作用引起的结构或构件的不可恢复变形。
条文说明
6.3.11~6.3.13 弹性变形的重要特征是其可逆性,即受力作用后产生变形,卸除载荷后,变形消失。材料在外力作用下产生形变,而在外力去除后,弹性变形部分消失,不能恢复而保留下来的那部分变形即为塑性变形。
6.3.14 构件变形容许值 allowable deformation of structural components
结构构件达到某一极限状态时所能允许的最大变形值。
6.3.15 构件挠度容许值 allowable deflection of structural compo-nents
由结构构件的使用功能、非结构构件的影响以及观感因素等的正常使用极限状态要求所确定的竖向位移限值。
条文说明
6.3.14~6.3.15 构件变形容许值和构件挠度容许值是结构或构件满足其极限状态要求的最大值。
6.3.16 动力系数 dynamic coefficient
承受动力荷载的结构或构件,按静力设计时所采用的系数,其值为结构或构件的最大动力效应与相应的静力效应的比值。
6.3.17 动应力 dynamic stress
在动力荷载作用下构件产生的内力。结构或构件除了静荷载产生的应力外,在动力荷载作用下,产生随时间而变化的附加动力影响,所产生的应力称动应力,当动应力很微小并小于静荷载产生应力的5%时,一般可不计。
条文说明
6.3.17 试验表明动应力小于比例极限时,胡克定律仍然适用,并且动弹性模量与静载时相同。
6.3.18 疲劳 fatigue
循环加载下,发生在材料或结构某点的局部、永久性的损伤递增过程。
6.3.19 疲劳应力 fatigue stress
在规定的循环应力幅值和大量重复次数下,材料所能承受的最大交变应力。
6.3.20 疲劳裂纹扩展 fatigue crack propagation
在循环荷载作用下,含裂纹物体中裂纹不断扩展的现象。
6.3.21 疲劳损伤 fatigue damage
在交变荷载作用下材料性质的逐渐劣化。
6.3.22 疲劳破坏 fatigue failure
在远低于材料强度极限的交变应力作用下,材料发生破坏的现象。
条文说明
6.3.18~6.3.22 承受振动荷载的结构或元件,会产生微小的裂纹。裂纹将随着振动荷载周次的增加而逐渐扩展。随着裂纹尺寸增大,结构或元件的剩余强度逐步减小,最后导致断裂。疲劳裂纹的萌生从宏观而言,总是起源于应力集中区、高应变区、强度最弱的基体、结构拐角、加工切削裂焊缝、腐蚀坑等区域。从微观而言可分为滑移带开裂、晶界开裂、非金属夹杂(或第二相)与基体界面开裂三种机制。 具有初始裂纹或缺陷的构件,即使这些初裂纹或缺陷未达到失稳扩展的临界尺寸,但是在振动荷载作用下,也会逐渐扩展,导致疲劳破坏。对于没有宏观裂纹的试件,在振动荷载作用下,也可能萌生裂纹,最后裂纹扩展直到断裂。因此,疲劳破坏时的应力远比静载荷破坏应力低,而且疲劳破坏时一般都没有明显的塑性变形,对工程结构的危害很大,这是要努力避免的。
6.3.23 应力集中 stress concentration
指物体中应力局部增高的现象,一般出现在物体形状急剧变化的地方,如缺口、孔洞、沟槽以及有刚性约束处。
条文说明
6.3.23 应力集中能使物体产生疲劳裂纹,也能使脆性材料制成的零件发生静载断裂。在应力集中处,应力的最大值(峰值应力)与物体的几何形状和加载方式等因素有关。局部增高的应力随峰值应力点间距的增加而迅速衰减。由于峰值应力往往超过屈服极限而造成应力的重新分配,所以,实际的峰值应力常低于按弹性力学计算得到的理论峰值应力。
6.3.24 应力松弛 stress relaxation
受拉预应力在恒定温度下,拉应力随时间推移而降低的现象。
条文说明
6.3.24 结构材料在恒定高温的承载状态下,总应变(弹性应变加塑性应变)保持不变,而应力随时间的延长逐渐降低的现象,简称松弛。松弛和蠕变是一个问题的两个方面。结构材料在恒定高温下工作,当保持应力恒定就产生蠕变,而当保持总应变恒定就产生松弛。
6.3.25 共振应力 resonance stress
当动荷载的干扰频率接近于结构的自振频率时产生的应力。
6.3.26 构件开裂 cracking of structural components
当振动引起构件产生过大的动应力和变形时,动静应力之和超过支承构件的抗裂强度,将出现裂缝。
条文说明
6.3.26 对钢筋混凝土结构来说,正常使用阶段中由各种振动荷载引起的横向裂缝属于正常现象。通常,适当的横向裂缝不会影响到结构构件的承载能力,可以认为是无害裂缝。但在振动剧烈或其他恶劣环境下,横向裂缝对混凝土结构耐久性的影响就会显现出来,其中的一个主要方面就是,持续的有害振动会造成裂缝的快速发展,使结构提前发生破坏的可能性增大,继而影响到结构的承载能力和安全性。
6.3.27 龟裂 crack
振动引起的出现龟甲纹状的裂纹。
条文说明
6.3.27 “龟裂”的特征主要体现在形状方面:其裂缝呈龟壳状和鱼鳞状,一般稍短、细、浅、密。振动引起的“龟裂”破坏,需要在结构设计中做好充分考虑,如减少水泥中的有害物质,清洗骨料,搞好骨料级配等。
6.3.28 倒塌 collapse
由于振动过大导致建(构)筑物关键构件破坏而出现坍塌现象。
6.3.29 连续倒塌 progressive collapse
初始的局部破坏,从构件到构件扩展,最终导致整个结构倒塌,或结构一部分倒塌。
条文说明
6.3.28~6.3.29 倒塌或连续倒塌是振动引起建(构)筑物破坏的最不利情况,是需要在实际工程中坚决予以杜绝的现象。当振动荷载持续施加在建(构)筑物时,一定要做好整体和构件细部的振动水平测量工作,并进行容许振动值的对比,当发现达到、超过容许振动水平或结构构件发生明显破坏时,应立即采取防护措施,避免造成生命、财产的损失。
6.3.30 砂土液化 liquefaction of sand soil
砂土层中的孔隙水来不及排出,孔隙压突然升高,致使砂土层突然呈现出液态的物理性状。
条文说明
6.3.30 在强振动荷载(如强夯)作用下,处于地下水位以下的砂土,其性质可能发生明显的变化,致使它的表现具有类似液体的特征,这种现象称之为砂土液化,也称喷砂现象。砂土液化会致使砂土层突然呈现出液态,导致地基承载力大大下降,使地面建(构)筑物在形成的流砂中下沉,产生极大的破坏。
6.3.31 脆性破坏 brittle failure
结构或构件在破坏前无明显变形或其他预兆的突发性破坏类型。
6.3.32 延性破坏 ductile failure
结构或构件在破坏前有明显变形或其他预兆的破坏类型。
条文说明
6.3.31~6.3.32 延性破坏是由于变形过大,超过了材料或构件可能的变形能力而产生的,仅在构件的应力达到其极限强度后才发生。延性破坏前,总有较大的塑性变形发生,且变形持续的时间较长,很容易及时发现而采取措施予以补救,不致引起严重后果。脆性破坏前塑性变形很小,甚至没有塑性变形,计算应力可能小于结构或构件的屈服点,断裂从应力集中处开始。由于脆性破坏前没有明显的预兆,无法及时觉察和采取补救措施,而且个别构件的断裂常引起整个结构塌毁,因此在设计、施工时,要特别注意防止出现脆性破坏。
7 振动测量术语
7.1 测量仪器
7 振动测量术语
7.1 测量仪器
7.1.1 传感器 transducer/sensor
能感受到被测量的信息并按照一定的规律转换成可用输出信号的器件或装置。
条文说明
7.1.1 传感器通常由敏感元件、转换元件、变换电路以及辅助电源组成,其中的敏感元件是指能直接感受或响应被测量的元件,转换元件是指能将敏感元件感受或响应的被测量信息转换成适于传输或测量的电信号。如传感器的输出为规定的标准信号时,则通常将传感器称为变送器。
7.1.2 振动传感器 vibration transducer
能感受振动参量并转换成可用输出信号的传感器。
条文说明
7.1.2 振动参量指振动位移、速度、加速度等。
振动传感器内部机电变换原理不同,其输出的电量也各不相同。传感器根据其原理的不同,可以将机械量的变化变换为电动势、电荷、电阻或电感等电参量的变化。因此,振动传感器按其功能可有以下几种分类方法:
按机械接收原理分:相对式、惯性式;
按机电变换原理分:电动式、压电式、电涡流式、电感式、电容式、电阻式、光电式;
按所测机械量分:位移传感器、速度传感器、加速度传感器及扭振传感器。
7.1.3 加速度传感器/加速度计 acceleration transducer/accel-erometer
能感受加速度量并转换成可用输出信号的传感器。
条文说明
7.1.3 加速度传感器分为线加速度传感器和角加速度传感器,如未加说明,加速度传感器一般是指线加速度传感器。
加速度传感器按能感受空间上方向的多少分为单轴加速度传感器和三轴加速度传感器,三轴加速度传感器能够感受空间上三个互相垂直方向。
工程上常用的加速度传感器类型主要有:压电式、压阻式、电容式、伺服式、光纤式等。为了提高传感器灵敏度减少噪声干扰,可将压电式加速度传感器与放大器集成到一起,做成具有内置放大器的IEPE/ICP加速度传感器。
7.1.4 速度传感器 velocity transducer
能感受速度量并转换成可用输出信号的传感器。
条文说明
7.1.4 振动速度传感器是惯性式传感器,它利用磁电感应原理把振动信号变换成电压信号,该电压值正比于振动速度值,可以用于测量轴承支座、机壳或结构的振动,分为振动线速度传感器和振动角速度传感器,如未加说明,振动速度传感器一般是指振动线速度传感器。
工程上按照安装形式分类有:接触式和非接触式两种;按照工作原理分类有:光电式和磁电式等类型。
7.1.5 位移传感器 displacement transducer
能感受位移量并转换成可用输出信号的传感器。
条文说明
7.1.5 位移传感器分为线位移传感器和角位移传感器,如未加说明,位移传感器一般是指线位移传感器。
工程上常用的位移传感器主要有:差动变压器式位移传感器、电感式位移传感器、电涡流式位移传感器、电容式位移传感器、电阻式(拉线式、滑动电阻式)位移传感器、应变式位移传感器、磁致伸缩式位移传感器、光电式位移传感器等。
7.1.6 冲击传感器 shock transducer
能感受冲击量并转换成可用输出信号的传感器。
7.1.7 应变放大器 strain amplifier
将电阻应变计或以电阻应变计为传感元件的传感器的输出电阻转换为电压并进行放大和调理的仪器。
条文说明
7.1.7 应变放大器也称为应变仪,按其测量应变变化频率范围分为静态应变仪和动态应变仪,按应变仪内部供桥电压的不同,分为直流供桥型和交流供桥型。
工程上常用的静态应变仪为直接将电阻应变计测量的应变转换为数字显示的数字式应变仪。
工程上常用的动态应变放大器有两种形式:具有多个通道的单台动态应变仪和将应变放大电路(或称应变适调仪)与计算机集成的动态应变采集仪。单台动态应变仪各通道通常具有多个增益档、低通滤波档以及内部标定器,其性能指标主要有非线性误差、标定值误差、增益档误差、频响误差、低通滤波器滤波特性、零位漂移、示值稳定性等。
7.1.8 电荷放大器 charge amplifier
将传感器输出的电荷转换为电压并进行放大和调理的仪器。
条文说明
7.1.8 工程上常用的电荷放大器指的是将输入端接收的电荷量转换成电压量并进行放大的仪器,有两种形式:具有多个通道的单台电荷放大器和将电荷放大电路(或称电荷适用仪)与计算机集成的电荷采集仪。单台电荷放大器各通道通常具有多个增益档、低通滤波档、高通滤波档以及归一化档(也叫传感器灵敏度档)和积分放大器档,其性能指标主要有非线性误差、归一化误差、增益档误差、频响误差、上限频率、下限频率、失真度、输入等效电荷噪声等。
7.1.9 滤波器 filter
利用通过或增强输入信号中某些频率分量,抑制或衰减输入信号中另一些频率分量的方式来分离并取舍信号成分的装置。
条文说明
7.1.9 滤波器指有选择地让某些给定频率范围的信号通过,而滤除其他频率范围信号的器件,按构造方法可分为模拟滤波器和数字滤波器。模拟滤波器是用电子元器件等硬件组成的滤波器,如由电阻、电容、电感组合电路构成的无源滤波器,由运算放大器、电阻、电容等组合电路构成的有源滤波器。
滤波器可以是单独的仪器,也可以是测量仪器的一部分或测量系统中的一个组件。这些作为器件的滤波器一般为模拟滤波器。
滤波器按通过信号频段范围分为低通滤波器、高通滤波器、带通滤波器和带阻滤波器。
7.1.10 抗混叠滤波器 anti-aliasing filter
防止分析中出现频率混叠现象,滤除混叠频率分量的滤波器。
7.1.11 数据采集仪 data acquisition instrument
将输入的模拟信号采集后数字化并能够存储在自带的存储介质或配套连接的计算机硬盘内的一种仪器。
条文说明
7.1.11 数据采集仪指的是一种能将物理信号经过调理放大、滤波、A/D转换为数字信号并将其记录下来的仪器的统称,根据其输入信号类型,可以分为电压型、电荷型、应变型、温度型、万用型等多种类型。根据其采样频率,又分为动态数据采集仪、静态数据采集仪等,在数据采集仪的基础上,还可以扩展为信号分析仪等。一般有多个输入通道,通道最大采集速率、模数转换器位数、存储深度、输入通道频带等是选择和使用数据采集仪的主要参数。
7.1.12 动态信号分析仪 dynamic signal analyzer
基于快速傅里叶变换原理和数字信号处理技术对动态信号进行分析的仪器。
条文说明
7.1.12 动态信号分析仪可对信号进行时域分析、时差域分析(相关分析)、频域分析(功率谱、频响函数等分析)和幅值域分析(直方图、概率密度等分析)等。分析仪一般还具有较齐全的辅助功能,如加窗、平均、细化、重叠、内装信号源等。
7.1.13 无线传感器网络 wireless sensor network
由大量的静止或移动的传感器通过无线通信方式形成的一个多跳的、自组织的网络系统。
条文说明
7.1.13 无线传感器网络可以协作地感知、采集、处理和传输网络覆盖地理区域内被感知对象的信息,并最终把这些信息发送给网络的所有者。
7.1.14 光纤传感器信号解调仪 fiber optical sensing interro-gator
将光纤传感器输出的含有被测量信息的光信号转变成电信号并还原为被测量信号的仪器。
条文说明
7.1.14 目前光纤传感器信号解调仪主要有光纤光栅解调仪、光纤法-珀(FP)解调仪、干涉型光纤传感器解调仪等。其性能指标主要有解调频率范围、频响误差、非线性误差等。
7.1.15 数字存储示波器 digital storage oscilloscope
将被测电信号进行模数转换、存储、处理后,再进行显示的一种示波器。
条文说明
7.1.15 数字存储示波器一般应包括输入通道、采集控制与数据存储装置、显示装置、输出接口、适配器等部件。
7.2 仪器性能指标
7.2 仪器性能指标
7.2.1 测量范围 measurement range
在允许误差限内由被测量的两个极值确定的区间。
条文说明
7.2.1 测量范围,也称为工作范围,是指测量仪器的误差处于规定的极限范围内的被测量的示值范围,也就是指测量的下限到测量的上限一个区间。在这一规定的测量范围内使用,测量仪器的示值误差必处在允许极限内;而若超出量范围使用,示值误差就将超出允许极限。换言之,测量范围就是在正常工作条件下,能确保测量仪器规定准确度的被测量值的范围。
7.2.2 量程 range
仪器标称范围的上、下两极限之差的值。
条文说明
7.2.2 量程是指在测量范围内的上下两极限之差的值。如果测试仪器的测量下限为零,则所能测量的物理量的最大值等于其量程。
7.2.3 灵敏度 sensitivity
输出量的变化值与相应的被测量的变化值之比。
7.2.4 横向灵敏度 transverse sensitivity
传感器在与其灵敏轴垂直的方向被激励时的灵敏度。
条文说明
7.2.4 直线传感器的功能在于把直线机械位移量转换成电信号,在测量运动方向上的灵敏度应为其最大灵敏度,对应的轴向为传感器的灵敏轴。与灵敏轴垂直的方向称为传感器的横向轴,传感器在横向轴方向的灵敏度称为横向灵敏度。传感器存在横向灵敏度,对于测量方向上的感知信号是一种干扰,因此要求传感器的横向灵敏度越小越好。
7.2.5 横向灵敏度比 transverse sensitivity ratio
传感器或振动设备的最大横向灵敏度与沿灵敏轴方向的灵敏度之比,用百分数表示。
条文说明
7.2.5 横向灵敏度比是指压电元件除了产生有用的纵向压电效应外,还有有害的横向压电效应,它是表征一个加速度传感器质量优劣的指标,以相当于轴向灵敏度的百分数来表示。加速度传感器的横向灵敏度比应低于5%。横向灵敏度比TSR计算公式为:TSR%=(s3/s1)×100%,其中,s3为横向灵敏度,s1为轴向灵敏度。
7.2.6 准确度 accuracy
测量值与真值之间的一致程度,以误差来表示。表征仪器的指示值与相应的真值的接近程度。
条文说明
7.2.6 测量准确度是指测量结果与被测量真值之间的一致程度,当测量提供较小的测量误差时就说该测量是较准确的。在我国工程领域中准确度有时称为精确度或精度。测量准确度不应与“测量正确度”、“测量精密度”相混淆,“测量正确度”是指无穷多次重复测量所得量值的平均值与一个参考量值间的一致程度;“测量精密度”是指在规定条件下,对同一或类似被测对象重复测量所得示值或测得值间的一致程度。
7.2.7 漂移 drift
在一定的时间间隔内,输出中与被测量无关的变化量。
条文说明
7.2.7 测量仪器的漂移包括零点漂移、灵敏度漂移、温度漂移等。零点漂移是指当放大电路输入信号为零(即没有交流电输入)时,由于受温度变化、电源电压不稳等因素的影响,使静态工作点发生变化,并被逐级放大和传输,导致电路输出端电压偏离原固定值而上下漂动的现象,是平均值为零的输入信号,为输出时零值偏移的变化;灵敏度漂移是指在某一环境量(时间、温度等)的变化间隔内,灵敏度输出的变化;温度漂移是指由于周围温度变化而引起的零点或灵敏度等的漂移。
7.2.8 稳定性 stability
测量仪器保持其特性随时间恒定的能力。
条文说明
7.2.8 稳定性是指“测量仪器保持其计量特性随时间恒定的能力”。通常稳定性是指测量仪器的计量特性随时间不变化的能力。若稳定性不是对时间而言,而是对其他量而言,则应该明确说明。稳定性可以进行定量的表征,主要是确定计量特性随时间变化的关系。通常可以用以下两种方式:用计量特性变化某个规定的量所经过的时间,或用计量特性经过规定的时间所发生的变化量来进行定量表示,如灵敏度年稳定性。 对于测量仪器,尤其是基准、测量标准或某些实物量具,稳定性是重要的计量性能之一,示值的稳定是保证量值准确的基础。测量仪器产生不稳定的因素很多,主要原因是元器件的老化、零部件的磨损以及使用、储存、维护工作不仔细等所致。测量仪器进行的周期检定或校准,就是对其稳定性的一种考核。稳定性也是科学合理地确定检定周期的重要依据之一。它一般用测量仪器某个规定的特性经规定的时间量值所发生的变化率表示。
7.2.9 动态范围 dynamic range
指系统测试结果与系统噪声输出功率之比的对数值。单位为分贝(dB)。
条文说明
7.2.9 动态范围是指仪器(或系统)能够记录最大和最小(噪声)信号的范围,是不受各种噪声的影响而能获得准确测量结果的输入信号范围,是最大允许信号级与噪声级之比,一般以dB表示。动态范围最早是信号系统的概念,一个信号系统的动态范围被定义成最大不失真电平和噪声电平的差,而在实际用途中,多用对数和比值来表示一个信号系统的动态范围。 动态范围也用于模拟式振动控制系统和随机振动控制系统中,其中在模拟式振动控制系统中,动态范围是指可以控制的最大信号和最小信号之比,一般以dB表示,该参数与振动台、控制系统以及整个电路的干扰噪声有关;在随机振动控制系统中,动态范围是指在给定的频率范围内,系统最大输出的功率谱密度与本底噪声功率谱密度之比的对数,以dB表示。动态范围越大,系统的控制能力越强,控制效果越好。
7.2.10 响应时间 response time
在规定误差范围内,按一定量值施加激励至响应达到并保持所需要的时间。
条文说明
7.2.10 响应时间有时也叫反应时间。通常定义为测试量变化一个值后,传感器从10%达到90%,或从90%达到10%所需要的时间。一般可将响应时间分为:上升时间tR(Rise time)和下降时间tF(Fall time)。
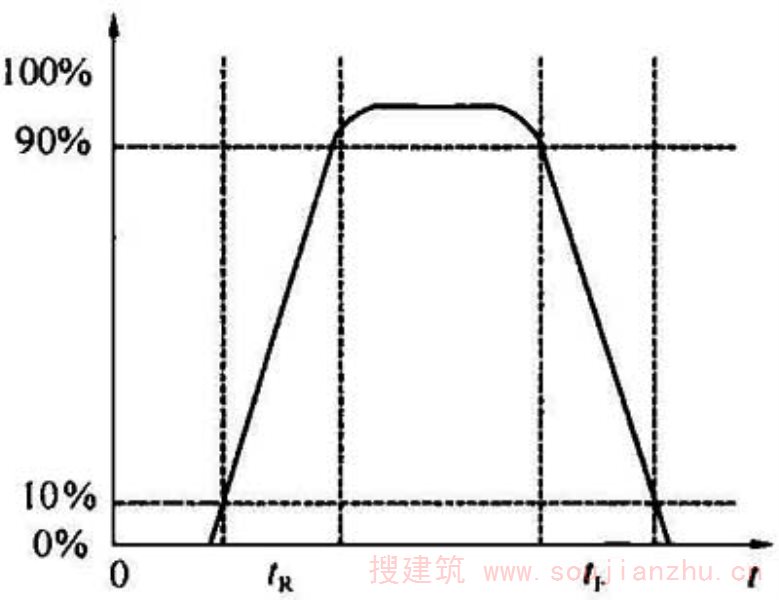
图4 脉冲响应时间示意
7.2.11 时间常数 time constant
表示过渡反应时间过程的常数。
条文说明
7.2.11 时间常数表示过渡反应的时间过程的常数,是由于被测量的阶跃变化,测量仪器输出上升到最终值的63%时所需要的
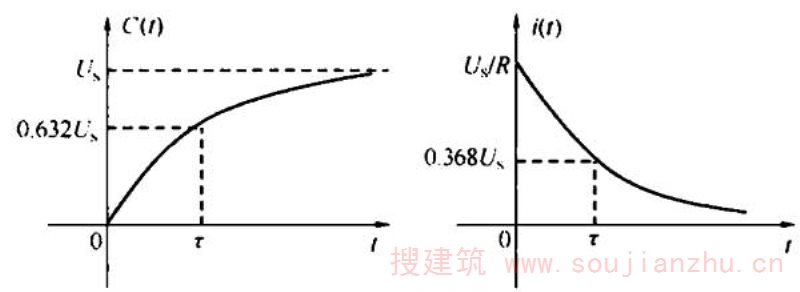
图5 时间常数示意
持续时间。或指该物理量从最大值衰减到最大值的1/e所需要的时间。在不同的应用领域中,时间常数也有不同的具体含义。
7.2.12 谐振频率 resonant frequency
传感器最大输出幅值对应的被测量频率。
条文说明
7.2.12 谐振频率与固有频率是不同的概念。前者是指响应最大值对应的频率,而后者是指系统自身动力特性。
7.2.13 波形失真 waveform distortion
系统输出信号与输入信号不成线性关系。
条文说明
7.2.13 波形失真是一种非线性失真,亦称非线性畸变,表现为系统输出信号与输入信号不成线性关系,由电子元器件特性曲线的非线性所引起。
按波形失真的不同情况,可分为幅度失真、频率失真、相位失真三种。
幅值失真是指在给定的某一频率上,测量仪器的输出与输入之比(即灵敏度)随输入幅值而变化时所呈现的失真;频率失真是指在给定的频率范围内,对于给定的激励幅值,当测量仪器的灵敏度随频率而变时所呈现的失真;相位失真是指输出与输入间的相移不是频率的线性函数时所呈现的失真。
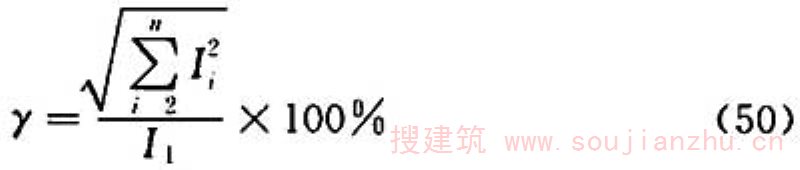
国际标准化组织(ISO)对于模拟式测量仪器的失真度采用总谐波失真度表示,按下式计算:
式中:γ——失真度;
Ii——谐波幅值。
用此式计算时,总谐波均方根值同背景噪声之比应不低10dB。
对于数字式测量仪器的失真度采用基波失真度表示,按下式计算:
式中:I1——基波幅值。
7.2.14 通道一致性 channel consistency
多通道测量或分析系统,在输入同一信号时,各通道之间输出的差异程度。
条文说明
7.2.14 通道一致性包括幅值一致性和相位一致性。幅值一致性常用dB表示,相位一致性常用角度来表示。
7.2.15 通频带 pass-band
上、下截止频率的差值,又称为带宽。
条文说明
7.2.15 通频带用于衡量放大电路对不同频率信号的放大能力。由于放大电路中电容、电感及半导体器件等电抗元件的存在,在输入信号频率较低或较高时,放大倍数的数值会下降并产生相移。通常情况下,放大电路只适用于放大某一个特定频率范围内的信号。 如图6所示为某放大电路的幅频特性曲线。f1—f2之间为通频带。 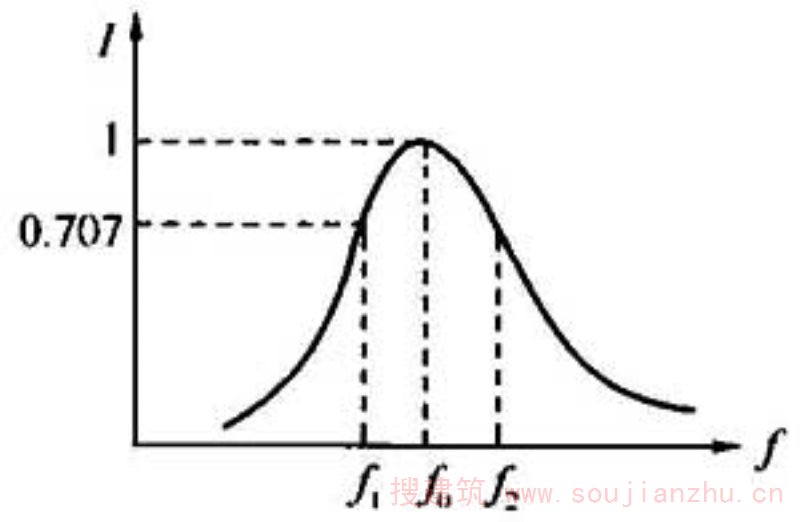
图6 通频带宽度 下限截止频率f1:在信号频率下降到一定程度时,放大倍数的数值明显下降,使放大倍数的数值等于0.707倍的频率称为下限截止频率f1。 上限截止频率f2:在信号频率上升到一定程度时,放大倍数的数值也将下降,使放大倍数的数值等于0.707倍的频率称为上限截止频率f2。 通频带:f1与f2之间形成的频带称通频带。 或者定义为:在信号传输系统中,系统输出信号从最大值衰减3dB的信号频率为截止频率,上下截止频率之间的频带称为通频带,用BW表示。 通频带越宽,表明放大电路对不同频率信号的适应能力越强。 通频带越窄,表明电路对通频带中心频率的选择能力越强。
7.2.16 3dB带宽 3dB bandwidth
标称上、下截止频率的响应比最大响应降低3dB(半功率点)的带宽,又称半功率带宽。
条文说明
7.2.16 一般来说,频谱密度是一个类似“拱形”的形状。在某个频点频谱密度最大(即拱形顶端),两侧则逐渐减小。设频谱密度最大处的值为A,则3dB带宽就是频谱密度大于A/2的频带。
在对数坐标中就是—3dB的位置,也就是半功率点,对应的带宽就是功率在减少至一半以前的频带宽度,表示在该带宽内集中了一半的功率。
7.3 仪器的检定、校准
7.3 仪器的检定、校准
7.3.1 检定 verification
由计量技术机构确定并证实被测对象是否满足规定要求而做的全部工作。
条文说明
7.3.1 ISO/IEC 17025:2005《检测和校准实验室能力的通用要求》将“检定”定义为:“通过校验提供证据来确认符合规定的要求”。
国际计量组织对检定给出的定义是:“查明和确认计量器具是否符合法定要求的程序,它包括检查、加标记和(或)出具检定证书”。
7.3.2 校准 calibration
在规定条件下,为确定测量仪器或测试系统所指示的量值与对应的测量标准所复现的量值之间关系所进行的一组操作。
条文说明
7.3.2 ISO 10012-1《计量检测设备的质量保证要求》标准将“校准”定义为:“在规定条件下,为确定计量仪器或测量系统的示值或实物量具或标准物质所代表的值与相对应的被测量的已知值之间关系的一组操作”。
校准首先是得到校准值,然后是利用校准值获得修正值或修正因子,即由测量标准提供的量值就是被校仪器示值的标准值,标准值与示值之差是被校仪器示值的修正值,标准值与示值之比是被校仪器示值的修正因子。校准结果是给出校准值(包括校准函数、校准图、校准曲线或校准表格),也可以给出修正值或修正因子。
按校准的时域状态分类,有:
(1)静态校准:在校准过程中,各输入量不随时间而变化,称为静态校准。例如:重力场校准、静态力校准等。
(2)动态校准:与被测量随时间(或其他影响量)变化有关的校准过程,称为动态校准。
(3)稳态校准:校准源的运动参数在校准时间段不随时间变化(或周期性变化)的校准称为稳态校准。例如:单双离心机校准、正弦振动校准,互易法校准等。
(4)瞬态校准:当系统的输入量或初始状态在某一瞬间发生突然变化时,描述系统的一些特征量随时间立刻产生显著变化,然后逐渐趋于稳定,这个过程称为“瞬态”。在瞬态过程中进行的校准称为瞬态校准。例如冲击校准、激波阶跃压力校准等。
7.3.3 绝对法校准 absolute calibration
按照运动量用基本量(如振幅、频率等)来校准传感器的方法。
7.3.4 比较法校准 comparison calibration
用参考标准来校准传感器的方法。
条文说明
7.3.3~7.3.4 绝对法校准对校准仪器精度要求较高,而相对法校准对校准仪器允许有一定误差,它是通过标准传感器与被校传感器的比较而获得被校传感器性能的校准方法。互易校准法也是一种绝对校准方法,它是利用传感器(例如压电式、磁电式传感器、动圈式速度计、电动式振动台的动圈等)的机-电可逆性(也称双向性)、线性和无源性,对振动传感器进行校准的方法。它除了质量测量是机械量测量外,其余参量采用电子测量,其精度主要取决于电测精度,避免了直接测量加速度、速度、位移等振动计量中大的直接误差源,校准测量准确度高。振动比较法校准是通过标准传感器与被校传感器的比较而获得被校传感器的特性,校准时通常在标准振动台上同时“背靠背”地安装标准传感器和被校传感器。最常用的比较法为:
(1)正弦比较法:振动台产生一定频率和幅值的正弦激励,对两个传感器的输出进行比较。
(2)随机比较法:由标准传感器套组、标准振动台、动态信号分析仪、随机振动控制器组成校准系统,其中随机振动控制器闭环控制振动台,并产生所需的各种加速度谱密度的谱型激励振动台,然后对标准传感器和被校传感器的输出采用一定的方法进行比较。
7.3.5 测量不确定度 uncertainty of measurement
表征合理地赋予被测量值的分散性,与测量结果相联系的参数。
条文说明
7.3.5 测量不确定度一般由多个分量组成。其中一些分量可以根据一系列测量值的统计分布进行测量不确定度的A类评定,用实验标准偏差表征。而另一些分量则可以根据经验或其他信息假设的概率分布进行测量不确定度的B类评定,用标准偏差表征。
7.3.6 测量误差 measurement error
测量值与真实值之差,简称误差。
条文说明
7.3.6 真实值或称真值是客观存在的,是在一定时间及空间条件下体现事物的真实数值,但很难确切表达。测得值是测量所得的结果。这两者之间总是或多或少存在一定的差异,就是测量误差。
测量误差主要分为三大类:系统误差、随机误差、粗大误差。
7.3.7 系统误差 systematic error
在重复测量中保持不变或按可预见方式变化的测量误差的分量。
条文说明
7.3.7 系统误差是在对同一被测量进行多次测量过程中,出现某种保持恒定或按确定的方法变化的误差,就是系统误差。
系统误差又叫作规律误差。它是在一定的测量条件下,对同一个被测尺寸进行多次重复测量时,误差值的大小和符号(正值或负值)保持不变;或者在条件变化时,按一定规律变化的误差。前者称为定值系统误差,后者称为变值系统误差。
系统误差是与分析过程中某些固定的原因引起的一类误差,它具有重复性、单向性、可测性。即在相同的条件下,重复测定时会重复出现,使测定结果系统偏高或系统偏低,其数值大小也有一定的规律。例如,测定的结果虽然精密度不错,但由于系统误差的存在,导致测定数据的平均值显著偏离其真值。如果能找出产生误差的原因,并设法测定出其大小,那么系统误差可以通过校准的方法予以减少或者消除,系统误差是定量分析中误差主要来源。
7.3.8 随机误差 random error
在重复测量中按不可预见方式变化的测量误差的分量。
条文说明
7.3.8 随机误差也称为偶然误差和不定误差,是由于在测定过程中一系列有关因素微小的随机波动而形成的具有相互抵偿性的误差。其产生的原因是分析过程中种种不稳定随机因素的影响,如室温、相对湿度和气压等环境条件的不稳定,分析人员操作的微小差异以及仪器的不稳定等。随机误差的大小和正负都不固定,但多次测量就会发现,绝对值相同的正负随机误差出现的概率大致相等,因此它们之间常能互相抵消,所以可以通过增加平行测定的次数取平均值的办法减小随机误差。
7.3.9 粗大误差 coarse error
在一定的测量条件下,超出规定条件下预期的误差。
条文说明
7.3.9 一般来说,给定一个显著性的水平,按一定条件分布确定一个临界值,凡是超出临界值范围的值,就是粗大误差,它又叫做粗误差或寄生误差。
粗大误差不具有抵偿性,它存在于一切科学实验中,不能被彻底消除,只能在一定程度上减弱。它是异常值,严重歪曲了实际情况,所以在处理数据时应将其剔除,否则将对标准差、平均差产生严重的影响。
7.3.10 最大允许误差 maximum permissible error
对给定的测量仪表,规范、规程等所规定的允许误差极限值。
条文说明
7.3.10 最大允许误差是由测量仪器相应的规范或规程所允许的,相对于已知参考量值的测量误差的极限值,是测量仪器所规定误差的两个极值。也称误差限。英文简写mpe。
这是指在规定的参考条件下,测量仪器在技术标准、计量检定规程等技术规范上所规定的允许误差的极限值。这里规定的是误差极限值,所以实际上就是测量仪器各计量性能所要求的最大允许误差值。可简称为最大允许误差,也可称为测量仪器的允许误差限。最大允许误差可用绝对误差、相对误差或引用误差等来表述。
7.3.11 准确度等级 accuracy class
在规定工作条件下,使测量误差或仪器的测量不确定度保持在规定极限内的测量仪器的等级或级别。
条文说明
7.3.11 准确度等级是指符合一定的计量要求,使误差保持在规定极限以内的测量仪器的等别、级别。
准确度等级是对测量仪器仪表的分级,通常用约定的数字或符号表示。各级准确度等级的测量仪器应符合相应不确定度的计量要求。
7.3.12 校准曲线 calibration curve
在规定条件下,表示被测量值与被测实际值之间关系的曲线。
条文说明
7.3.12 根据校准数据所绘制出的表征输入-输出关系的曲线。
7.4 数据处理
7.4 数据处理
7.4.1 数据 data
对某物理量进行测量的采样值。
7.4.2 数据长度 data length
一系列不间断采样数据点组成的集合中数据采样点的个数。
7.4.3 采样频率 sampling frequency
对于均匀的采样数据,单位时间内采样的点数。
7.4.4 奈奎斯特频率 Nyquist frequency
以给定的采样速率采集的数据的最大可用频率。
条文说明
7.4.4 奈奎斯特频率fN=fs/2,其中fs为采样频率。
7.4.5 数据预处理 data preprocessing
在进行数据分析之前进行的数据处理。
7.4.6 去趋势项 detrending
在时域内消除或减小周期大于记录长度的频率成分的全部处理过程。
条文说明
7.4.6 测试信号中的趋势项一般是指信号中周期大于记录长度的成分。提取、消除测试信号中的趋势项是数据处理中的一个重要环节。趋势项的存在,会使时域中的相关分析或频域中的功率谱分析产生很大的误差。
7.4.7 平滑处理 smoothing
将数据块移动和平均的运算过程,也称滑动平均。
条文说明
7.4.7 平滑处理一般采用线性平滑公式,例如,三个数据点用下式来做平滑:

7.4.8 平均 averaging
对各个测试数据进行加权处理的方法。
条文说明
7.4.8 平均可分为: (1)线性平均:对新、旧数据作相同的加权,通常用于平稳随机数据,其公式为: 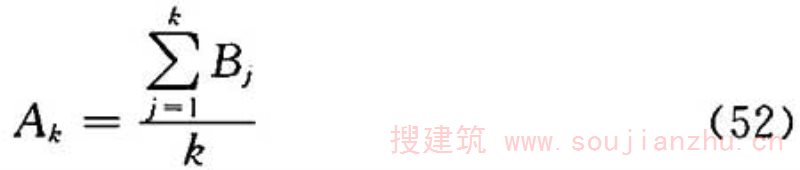
式中:Bj——第j个测试数据。 (2)指数平均:对新数据的加权大于旧数据,通常用于非平稳随机数据,其公式为: 
式中:Bk——第k个测试数据; N——总加权数。 (3)有效值平均:对各测试数据的有效值进行平均处理,也称功率平均或RMS平均,其公式为: 
式中:xi——各测试数据有效值
7.4.9 计权 weighting
对信号进行变换或约束的一种方法,其基本点是突出信号中的某些成分,抑制信号中的另一些成分。
条文说明
7.4.9 对信号不同成分所乘的比例因子称为计权函数,根据计权函数设计的电网络,用以达到对信号进行预期变换的目的,称为计权网络。例如,声级计的A计权是频率计权,时间窗和滞后窗是时域计权,谱窗则是频域计权。计权函数又称为加权函数,简称权函数。
7.4.10 数字滤波 digital filtering
通过一定的算法,对采集后的信号进行处理,将某个频段的信号进行滤除,得到新的信号的过程。
7.4.11 窗函数 window function
为了减少因数据截断造成的信号频潜能量泄漏,对信号进行截断处理时所用的权函数,简称窗。
条文说明
7.4.11 理想的窗函数的傅里叶谱的主瓣应很窄(分辨率高),旁瓣应很低(泄露少),实际窗函数不可能同时兼顾这两项指标。窗分为时域窗和频域窗,常使用时域窗,将其与数据块相乘以改善频率的某些特性,减小数据点的误差。常用的时域窗有: (1)矩形窗:在窗内对所有的样值都给以等计权的窗函数,这种窗的优点是主瓣比较集中,缺点是旁瓣较高,并有负旁瓣,导致变换中带进了高频干扰和泄漏,甚至出现负谱现象。其表达式为: 
(2)汉宁窗:又称升余弦窗,可以看作是3个矩形窗的频谱之和,主瓣加宽并降低,旁瓣相互抵消而显著减小,从减小泄漏观点出发,汉宁窗优于矩形窗。但汉宁窗主瓣加宽,相当于分析带宽加宽,频率分辨力下降。其表达式为: 
(4)布拉克曼窗:二阶升余弦窗,主瓣宽,旁瓣较低,但等效噪声带宽比汉宁窗大,波动却小一些。频率识别精度低,但幅值识别精度高,有更好的选择性,常用于检测两个频率相近幅度不同的信号。 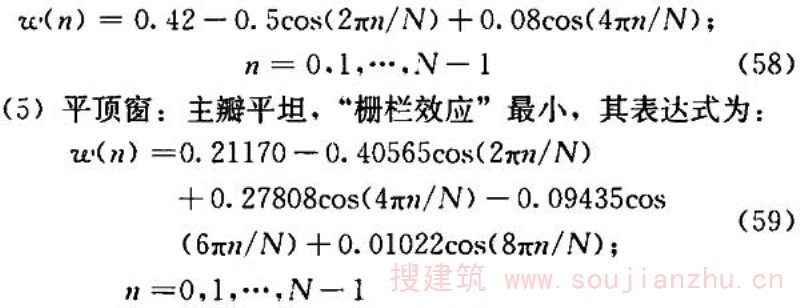
(6)巴特利特窗:一种逐渐过渡的三角窗,可消除由于矩形窗突变的过渡带造成的吉布斯现象。它是两个矩形窗的卷积,与矩形窗相比,主瓣宽约为其宽度的两倍,但旁瓣小,无负旁瓣。其表达式为: 
(7)凯瑟窗:由定义的一组可调的由零阶贝塞尔函数构成的窗函数,通过调整参数β可以在主瓣宽度和旁瓣衰减之间自由选择它们的比重。对于某一长度的凯瑟窗,给定β,则旁瓣高度也就固定了。凯瑟窗函数的时域形式可表示为: 
其中,I0(β)是第1类变形零阶贝塞尔函数,β是窗函数的形状参数,由下式确定: 
其中,α为凯瑟窗函数的主瓣值和旁瓣值之间的差值。改变β的取值,可以对主瓣宽度和旁瓣衰减进行自由选择。β的值越大,窗函数频谱的旁瓣值就越小,而其主瓣宽度就越宽 (8)高斯窗:一种指数窗,主瓣较宽,故而频率分辨力低;无负的旁瓣,第一旁瓣衰减达—55dB。常被用来截短一些非周期信号,如指数衰减信号等。指数窗可使小阻尼系数采样结束时,尚未衰减完的响应变为零,以避免泄露,对响应大处加大权,响应小处加小权,以提高信噪比。其表达式为: 
7.4.12 泄漏 leakage
在信号处理过程中,由于对时域波形加了不合适的窗函数而导致在频域中出现很多旁瓣影响的现象。
条文说明
7.4.12 旁瓣影响指起伏波动延伸到很宽范围的频率分量。
7.4.13 栅栏效应 picket fence effect
对于频谱连续的非周期信号,经采样截断后,进行离散傅里叶变换分析时,得到的仅仅是连续信号频谱上的有限个点,而有一部分频谱分量将被挡住,好像是通过栅栏观察频谱。这种现象称为栅栏效应。
7.4.14 吉布斯效应 Gibbs effect
将具有不连续点的周期函数(如矩形脉冲)进行傅里叶级数展开后,选取有限项进行合成。当选取的项数越多,在所合成的波形中出现的峰起越靠近原信号的不连续点,当选取的项数很大时,该峰起值趋于一个常数(大约等于总跳变值的9%)的现象。
7.5 振动试验及激励
7.5 振动试验及激励
7.5.1 振动环境试验 vibration environment test
为了解试验对象在使用等过程中对于承受各种外来振动或由于自身运行而产生的振动时性能是否符合要求、是否会破坏、达到预期寿命前是否会失效,或为了寻找薄弱环节所做的各种试验。
7.5.2 动态特性测定试验 dynamic characteristic test
为了解试验对象的动态特性和验证设计时采用的力学模型是否正确所做的试验。
7.5.3 载荷识别试验 load identification test
为了确定振源的位置、性质、时间历程或谱特性及传递途径等所做的试验。
7.5.4 共振试验 resonance test
为检验试验对象是否会因共振发生破坏,在对象的共振频率以规定幅值的加速度或位移,在规定时间内所做的振动试验。共振试验是振动环境试验的一种。
7.5.5 耐振试验 vibration endurance test
为检验试验对象在规定的振动条件下的动强度、疲劳性能及工作性能所做的试验。耐振试验是振动环境试验的一种。
7.5.6 模态试验 modal test
为确定系统模态参数所做的振动试验。
条文说明
7.5.6 模态试验通常先由激励和响应关系得出频率响应矩阵,再由曲线拟合等方法识别出各阶模态参数。模态试验是动态特性测定试验的一种。
7.5.7 冲击试验 shock test
为检验对象承受冲击载荷能力而做的试验。
7.5.8 综合试验 comprehensive test
两种或多种试验环境同时作用于试验对象的试验。
条文说明
7.5.8 例如对试验对象同时进行振动、压力、温度、湿度的试验。
7.5.9 加速试验 accelerating test
为加快试验速度、减少试验时间,采用提高应力水平的方法而采取的提高振动量级的试验。
7.5.10 正弦激励 sinusoidal excitation
单个离散频率的正弦信号,以固定频率或频率逐步改变的方式进行的激励。
7.5.11 扫描正弦激励 sweeping sinusoidal excitation
正弦信号在试验(测试)频率范围内,从下限频率到上限频率以连续扫描的方式进行的激励。
条文说明
7.5.11 扫描正弦激励有三种形态:在扫描过程中,可以停留在某个或几个频率上做定频振动,则称为正弦驻留;扫描的周期以及结构的脉冲响应衰减时间小于测量数据的周期T,则称为快速正弦扫描激励,它也是一种瞬态随机激励;否则,称为慢速正弦扫描激励,适用于稳态响应的获得。
7.5.12 纯随机激励 pure random excitation
具有一定谱型和带宽的、概率密度为高斯分布的随机信号进行激励的方式。
条文说明
7.5.12 纯随机激励可同时激起该段频率范围内的所有模态。随机激励产生的振动根据信号的频率范围分为窄带随机振动和宽带随机振动。窄带随机振动的频率分量仅仅分布在某一窄频带内,其带宽与所研究的问题有关,但通常等于或小于1/3倍频程。窄带随机振动的波形类似于正弦振动,但其振幅和相位是随机变化的;宽带随机振动的频率分量分布在较宽频带内,通常等于或大于一个倍频程。
7.5.13 伪随机激励 pseudo random excitation
随机信号以固定周期重复出现的激励方式。
7.5.14 周期随机激励 periodic random excitation
在第一个随机激励后,在第二个周期稳定均衡后,在第三个周期进行测量;再重复此伪随机过程,但每个伪随机过程是随机的、互不一样的激励方式。
条文说明
7.5.14 周期随机激励具有伪随机和纯随机的优点。
7.5.15 瞬态随机激励 transient random excitation
只在测量周期的初始一段输出瞬态的随机信号,其占用时间可任意调节,以适应不同的阻尼结构的激励方式。
条文说明
7.5.15 瞬态随机激励每一个样本都具有不同的统计特性,经平均处理可以消除非线性影响。因此,这种激励方法兼有瞬态和随机双重优点。
7.5.16 冲击激励 shock excitation
利用经过选择的、瞬态的各种冲击波形作为激励源的一种激励方式。
条文说明
7.5.16 冲击激励可以是单次的,也可以是多次重复的,常称单次的为冲击激励,多次的为碰撞。
7.5.17 环境激励 environment excitation
利用自然环境的扰动作为激励源的一种激励方式。
条文说明
7.5.17 例如大地脉动、路面凹凸、海浪、噪声、风动以及湍流等。
7.5.18 激振器 vibration exciter
用以产生振动力,并能将这种振动力加到其他设备或被试结构上的振动激励装置。
条文说明
7.5.18 激振器是通常附加在设备或结构上的以提供所要求的输入力的设备。常用的激振器根据产生激振力的原理不同分为电磁式、电液式、磁致伸缩式、压电式等。
7.5.19 振动试验台 vibration generator/vibration machine
专门设计用于产生振动的、振动参数是可控制和可重现的、具有台面能够固定试验样品进行振动试验的机器。
条文说明
7.5.19 振动试验台简称振动台,也称振动发生器。振动试验台从广义上分为可产生直线振动的振动台、可在某一频率范围内绕回转轴做某种摆动的角振动台以及产生碰撞的冲击台。直线振动台根据激励源的工作原理可分为机械振动台、电动振动台、电磁振动台、压电振动台、磁致伸缩振动台、液压(伺服)振动台以及标准振动台。其中标准振动台是产生标准振动激励用来对振动传感器和测量仪进行检定校准的振动台。振动试验台的主要性能参数包括最大推力、额定负载、额定频率范围、额定加速度(速度、位移)、总谐波失真度、台面横向振动比、台面加速度幅值均匀度、台面加速度信噪比、漏磁等。
7.5.20 力锤 force hammer
由刚性质量块、紧固在质量块一端的力传感器和紧固在力传感器另一端的锤头组成的冲击激励试验用的锤形工具。
条文说明
7.5.20 力锤的激励带宽是由锤头的刚度和冲击锤的质量来控制的,可以用减小锤头刚度或增加力锤的质量来减小力锤的频率范围。但实际获得的频率范围还与试验结构在冲击点有效刚度和有效质量有关,对刚度低的结构难以用增加锤头刚度的办法来增加频率范围,此时用减小力锤质量的方法更加有效。使用力锤获得的精度取决于操作者保持冲击正确位置和方向的技巧。对小试验结构,可能需要一个合适的机械装置保持力锤在结构的某一指定位置和方向上激励。对需要较高能量的大试验结构,可以把大质量的锤用缆绳吊起来,靠质量的自由下落或摆动进行冲击激励,也可以用弹簧、电磁吸铁或其他方法将较小的质量块加速到较高的撞击速度。锤头的表面积应足以承受施加的最大冲击力,而又不使锤头和试验结构产生永久变形。另外,如果冲击位置要精确定位,则锤头的面积要小。力锤在冲击瞬间,速度矢量应该与力传感器的灵敏轴在同一条线上,并垂直于试验结构表面,其偏差应小于10度,细长的力锤容易保持合适的冲击方位。
7.5.21 阻抗头 impedance head
把加速度传感器和力传感器组装在一起,用来进行驱动点机械阻抗测量的装置。
条文说明
7.5.21 阻抗头中应避免加速度传感器对作用力的交叉影响,同时阻抗头与被测试结构连接时应当满足:阻抗头内部加速度传感器与被试结构之间的总柔度应当很小,因为大的柔度将会引起加速度测量误差;阻抗头的有效端部质量(即传感器的力敏感元件与结构之间的质量)相对于被试结构的自由有效质量(加速度阻抗)应当很小:阻抗头相对于连接平面内的轴惯性矩应足够小,使其绕该轴的转动引起的结构附加载荷最小。
8 振动控制术语
8.1 主动隔振
8 振动控制术语
8.1 主动隔振
8.1.1 隔振 vibration isolation
采用弹性元件(常配有阻尼元件)或屏障以减小振动传递的措施。
条文说明
8.1.1 隔振分两种:一种是对动力机器的振动进行主动隔振,减少振动向周围环境传递;一种是对精密设备等进行被动隔振,减少环境振动从基础向设备传递。
8.1.2 隔振系统 vibration isolation system
由隔振对象、台座结构、隔振器和阻尼器组成的系统。
8.1.3 隔振对象 vibration isolation object
需要采取隔振措施的机器、仪器、仪表、建(构)筑物等。
8.1.4 主动隔振 active vibration isolation
为了减小动力机器或其他振源产生的振动对周围环境、设备、建(构)筑物及人等的有害影响,而对其采取的隔振措施。
条文说明
8.1.4 主动隔振的原理如图7所示。主动隔振的目的是为了减少设备振动荷载向基础传递。
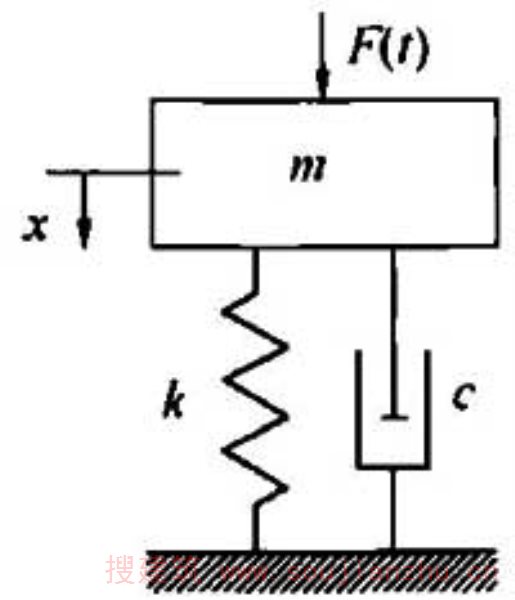
图7 主动隔振
8.1.5 主动隔振传递率 transmissibility of active vibration iso-lation
隔振系统在扰力作用下传递到基础上的输出响应幅值与输入响应幅值之比。
条文说明
8.1.5 隔振系统在简谐扰力作用下的主动隔振传递率的计算公式为:
8.1.6 冲击隔振 shock isolation
为减轻冲击对周围产生的振动影响,而对基础、附属设施或冲击装置采取的隔振措施。
8.1.7 单层隔振 single-stage vibration isolation
在设备与基座之间设置单层隔振元件,以控制设备本身的振动及其传播的隔振方法。
8.1.8 双层隔振 double-stage vibration isolation
在设备与基座之间设置一个中间框架,在设备与中间框架之间、中间框架与基座之间分别设置隔振元件,以控制设备本身的振动及其传播的隔振方法。
条文说明
8.1.8 采用双层隔振,可降低隔振系统的固有频率,提高其隔振效率。
8.2 被动隔振
8.2 被动隔振
8.2.1 被动隔振 passive vibration isolation
为减小振动敏感的仪器、仪表或建(构)筑物受外界的振动影响,而对其采取的隔振措施。
条文说明
8.2.1 被动隔振的原理如图8所示,其中地面的振动u(t)为输入。被动隔振的目的是为了减小周围环境的振动对隔振对象的影响。
8.2.2 被动隔振传递率 transmissibility of passive vibration isolation
隔振系统的输出响应幅值与外界干扰输入响应幅值之比。
条文说明
8.2.2 假设地基做简谐振动,隔振系统被动隔振传递率的计算公式为:
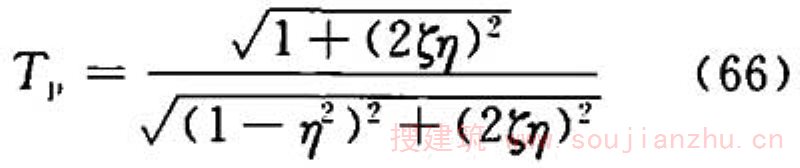
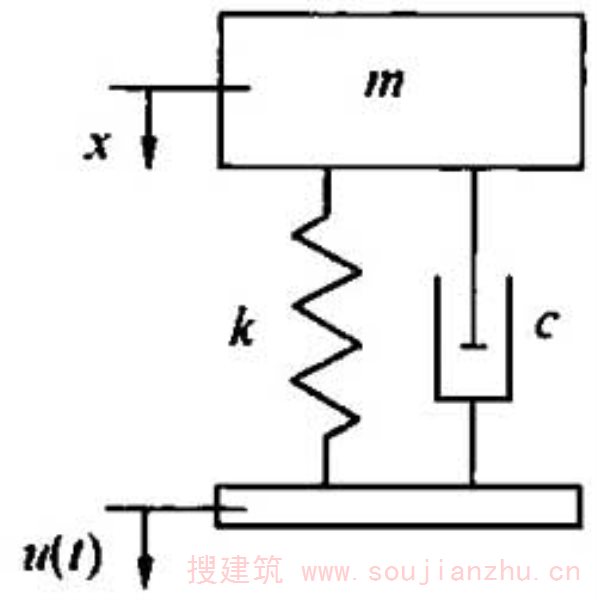
图8 被动隔振
当振源为简谐激励时,主动隔振的力传递率和被动隔振的位移传递率表达式相同。
8.2.3 隔振效率 vibration isolation efficiency
振动系统采用隔振后的振动响应幅值相对于隔振前振动响应幅值的差值与隔振前的振动响应幅值之比。
条文说明
8.2.3 隔振效率以百分比计算,简谐激励下振动位移的隔振效率计算公式为:

主动隔振时参考点位于隔振元件下方的基础表面或隔振对象周围地表面,被动隔振时参考点位于隔振元件上方的台座结构或隔振对象上,从振动传递路径(振源至响应)看是隔振元件之后的部位。
8.2.4 负刚度减振 negative stiffness vibration suppression
利用部分隔振元件刚度曲线的负刚度工作范围,减小隔振系统的动刚度,以此降低固有频率,从而实现低频隔振的方法。
8.3 减振与智能控制
8.3 减振与智能控制
8.3.1 主动控制 active control
通过控制机构改变振动系统的参数或施加与振动方向相反的控制力来改变结构动力特性的控制方法。
条文说明
8.3.1 主动控制需要实时测量控制对象的响应或干扰激励,在控制对象反应观测基础上实现的主动控制称为反馈控制,在干扰激励观测基础上实现的主动控制称为前馈控制。
8.3.2 半主动控制 semi-active control
利用控制机构来主动调节系统内部参数,使系统参数处于最优状态的控制方法。
条文说明
8.3.2 半主动控制与主动控制的原理基本相同,只是半主动控制实施控制力的作动器需要少量的能量调节,而且期望的控制力需要依靠控制装置的相对变形或相对速度来实现,因此,控制力实现方式和方向受到限制。
8.3.3 智能控制 intelligent control
采用智能控制算法确定控制力,或者利用智能驱动/阻尼装置实施控制力的振动控制方法。
条文说明
8.3.3 智能控制通过智能控制算法确定控制力,其控制力实现方式和控制原理与主动控制相同,实施控制力的作动器是智能驱动器或阻尼器。
8.3.4 混合控制 hybrid control
将主动控制、被动控制或智能控制等两种或两种以上控制方式,同时施加在同一结构上的振动控制形式。
8.3.5 减振 vibration suppression
通过振源干扰力或系统的传递特性改变而使控制对象振动减小的方法。
8.3.6 被动消能减振技术 passive energy dissipation technology
在控制对象上安装消能器,通过消能器消耗振动能量,提高减振能力的技术。
8.3.7 被动吸能减振技术 passive energy absorption technology
在控制对象上安装吸能器,通过吸能器转移、吸收和消耗振动能量,提高减振能力的技术。
8.3.8 PID控制 Proportion-Integral Derivation control
根据控制对象某个状态参数和参考值的误差,采用误差的比例、积分或微分项确定控制力的一种闭环控制技术。
8.3.9 线性二次型调节器控制 linear quadratic regulator con-trol
针对线性振动控制系统,选取系统状态和控制输入的二次型函数的积分作为性能指标函数的最优控制方法。
8.3.10 主动振动控制系统 active vibration control system
安装在控制对象上为控制对象提供控制力、改变阻尼或刚度的装置。
8.3.11 可变刚度系统 variable stiffness system
利用变刚度控制装置来改变控制对象的附加刚度,使结构的自振频率远离振源的卓越频率,避免控制对象发生共振,从而实现减少振动响应的系统。
条文说明
8.3.11 可变刚度系统通过变刚度控制装置中的刚度元件变形吸收和存储部分振动能量,然后释放其吸收的弹性变形能(实际转换为伺服系统的热能)。
8.3.12 可变阻尼系统 variable damping system
通过调节变阻尼装置的阻尼力,使其等于或接近主动控制力,从而实现与主动控制接近的控制效果的系统。
条文说明
8.3.12 可变阻尼装置可在液压流体阻尼器或黏滞流体阻尼器的基础上,设置可控伺服阀或装置以构成具有控制流体流量的变阻尼装置。
8.3.13 变刚度变阻尼系统 variable stiffness and variable damping system
可变刚度与可变阻尼联合使用的系统。
8.3.14 电液隔振系统 electro hydraulic vibration isolation system
通过液压伺服或电机伺服控制液压作动器或电动机施加控制力的隔振系统。
8.3.15 振动控制对象 vibration control object
安装了振动控制系统的工程结构或部件。
8.3.16 智能控制算法 intelligent control algorithm
采用模糊控制、神经网络控制和遗传算法等智能计算方法的控制算法。
8.3.17 模糊控制 fuzzy control
基于模糊逻辑系统,采用语言描述的模糊规则和模糊推理确定控制决策的一种智能控制算法。
条文说明
8.3.17 模糊逻辑系统由四部分组成:模糊化、模糊规则库、模糊推理机和解模糊化。模糊化是将精确输入量用模糊化的语言来描述,转换为与模糊规则库相匹配的语言,以供模糊推理机进行模糊推理;模糊规则库是一系列基于专家知识的语言描述,是模糊逻辑系统的核心部分,通常采用IF-THEN规则形式;模糊推理机是模糊逻辑系统的大脑,用来根据系统输入和模糊规则库进行推理分析作出决策,把模糊规则合成为一个从输入空间的模糊子集到输出空间模糊子集的映射;解模糊化是将模糊推理的结果转换为精确量。相比于传统的振动控制算法,模糊控制不依赖于控制对象的精确计算模型。
8.3.18 神经网络控制 neural network control
基于神经网络,对控制对象进行辨识并预测反应,进而采取控制决策的一种智能控制算法。
条文说明
8.3.18 神经网络具有通过学习逼近非线性映射的能力,可对非线性系统模型进行辨识,是非线性系统控制的前提和基础。
8.3.19 遗传算法 genetic algorithm
建立在自然选择和自然遗传学机理基础上的迭代自适应概率搜索方法。
条文说明
8.3.19 遗传算法可分为初始化、选择、交叉和突然变异四个部分,具有并行搜索和全局优化的能力。
8.3.20 自适应控制算法 adaptive control algorithm
根据控制对象和环境的改变或不确定性自动调节控制系统,并仍满足期望控制性能的控制算法。
8.3.21 颤振抑制 flutter suppression
利用反馈控制附加控制面(或原操纵面)运动以达到提高颤振临界速度的一种主动控制技术。
8.3.22 磁流变阻尼控制系统 magneto-rheological damping control system
通过施加电流调节磁场改变阻尼力的一种智能阻尼系统。
8.3.23 振动控制系统稳定性 stability of VCS
振动控制系统在平衡点邻域的局部特性,根据系统自由响应是否有界来定义。
8.3.24 振动控制系统鲁棒性 robustness of VCS
振动控制系统中控制对象和环境的改变或存在不确定性时,系统仍满足期望控制性能,分为稳定鲁棒性和性能鲁棒性。
8.3.25 振动控制系统设计位移 design displacement of VCS
振动控制系统预期达到的最大位移;对吸能器和主动质量驱动控制系统,也称为设计行程。
8.3.26 振动控制系统设计速度 design velocity of VCS
振动控制系统预期达到的最大速度。
8.3.27 振动控制系统设计加速度 design acceleration of VCS
振动控制系统预期达到的最大加速度。
8.3.28 设计控制力 design control force
在设计荷载下振动控制系统预期达到的最大控制力;对施加以阻尼力为主的振动控制系统,设计控制力又称为设计阻尼力。
8.3.29 振动控制系统极限位移 displacement capacity of VCS
振动控制系统允许的最大位移。
8.3.30 振动控制系统极限速度 velocity capacity of VCS
振动控制系统允许的最大速度。
8.3.31 振动控制系统极限加速度 acceleration capacity of VCS
振动控制系统允许的最大加速度。
8.3.32 极限控制力 ultimate control force
振动控制系统允许的最大控制力;对施加以阻尼力为主的振动控制系统,极限控制力也称为极限阻尼力。
8.4 控制装置
8.4 控制装置
8.4.1 隔振器 vibration isolator
隔离振动或冲击传递的弹性装置,常配有阻尼装置。
条文说明
8.4.1 其原理是利用弹性改变系统的固有频率以减少振动或冲击传递,并利用阻尼减少隔振对象的振动幅值。
8.4.2 阻尼器 damper
通过能量耗散的方法来减少冲击或振动的装置。
条文说明
8.4.2 阻尼器本身是一种减小振动和冲击的控制装置,也可作为隔振器或调谐质量阻尼器中的部件使用。
8.4.3 调谐质量阻尼器 Tuned Mass Damper(TMD)
一种在原系统上附加由质量和弹性元件及阻尼组成的子系统,并通过调谐子系统的固有频率,从而把能量转移到子系统以减小原系统振动幅值的装置。
条文说明
8.4.3 调谐质量阻尼器也称之为调谐质量减振器或动力吸振器。
调谐质量阻尼器可以是有阻尼的或无阻尼的,其减振作用主要通过调整其固有频率使质量相对于原系统的反向振动来实现。
调谐质量阻尼器可分为无动力源和有动力源两种类型。
8.4.4 圆柱螺旋钢弹簧隔振器 cylindrical spiral steel spring vibration isolator
由圆柱螺旋钢弹簧组成的隔振器,常配有阻尼装置。
8.4.5 板簧隔振器 plate spring vibration isolator
由板片弹簧叠合或并排组成的隔振器。
8.4.6 碟形弹簧隔振器 disk spring vibration isolator
由碟形弹簧叠合或并排组成的隔振器。
条文说明
8.4.6 碟形弹簧正叠合可增加其承载能力,反叠合可降低刚度;当既需增大承载能力又要降低刚度时,可采用正叠合和反叠合复合式组合。
8.4.7 气浮式隔振器 air floating vibration isolator
在密闭的、带有弹性气囊的容器中充入压缩气体而制成的隔振器。
8.4.8 聚氨酯隔振器 polyurethane vibration isolator
由弹性聚氨酯等材料为主制成的隔振器。
8.4.9 橡胶隔振器 rubber vibration isolator
由橡胶材料为主制成的隔振器。
条文说明
8.4.9 橡胶隔振器按其材料的主要受力状态,即受压缩或受剪切,分别称为压缩式或剪切式橡胶隔振器。压缩式隔振器可具有较大的承载能力,剪切式隔振器可具有较小的刚度。
8.4.10 钢丝绳隔振器 wire rope vibration isolator
将上、下两块金属板与多股钢丝紧密缠绕而成的钢丝绳组合在一起的隔振装置。
条文说明
8.4.10 利用钢丝之间的干摩擦提供阻尼,利用钢丝的弹性提供刚度。
8.4.11 黏滞阻尼器 viscous damper
由缸体、活塞、黏滞材料等部分组成,利用活塞在黏滞材料中运动产生黏滞阻尼耗散能量的减振装置。
8.4.12 金属阻尼器 metallic damper
利用金属材料良好的塑性和滞回性能制造的耗能装置。
8.4.13 电流变阻尼器 electro-rheological fluid damper
利用电流变效应,通过改变其两电极上的电压而调节其阻尼大小的耗能装置。
8.4.14 磁流变阻尼器 magneto-rheological fluid damper
一种采用磁流变液由电流驱动磁场调节的可调阻尼参数的智能耗能装置。
8.4.15 电涡流阻尼器 eddy current damper
利用导体在磁场中运动产生电涡流效应的耗能原理形成的非接触式阻尼装置。
条文说明
8.4.15 电涡流阻尼器不需要外部电源,并且无摩擦、无附加刚度。
8.4.16 黏弹性阻尼器 viscoelastic damper
由钢板和黏弹性材料黏合在一起,依靠黏弹性材料的滞回特性耗散能量的一种耗能装置。
8.4.17 摩擦阻尼器 friction damper
通过摩擦副之间的滑动摩擦消耗振动能量的一种耗能装置。
8.4.18 智能材料 intelligent material
一种具有生物特性的无生命材料,又称机敏材料。
条文说明
8.4.18 智能材料的特点是能感知外界信息,并通过自身或外界的某种反馈机制适时地改变材料本身的某些性质,从而对外界信息作出人们所期望的响应。
8.4.19 压电效应 piezoelectric effect
指由应力或应变诱导出电极化(或电场),或由电场诱导出应力或应变的现象。前者称正压电效应,后者称负压电效应。
8.4.20 压电材料 piezoelectric material
具有压电效应的材料,是一种既能作为驱动材料又能作为传感材料的智能材料。
8.4.21 形状记忆合金阻尼器 shape memory alloy damper
由具有形状记忆和大应变超弹性特性的合金材料制造成的耗能装置。
8.4.22 智能阻尼器 intelligent damper
利用结构振动的往复相对变形或相对速度,主动地调节阻尼力,尽可能地实现主动最优控制力的耗能装置。
条文说明
8.4.22 智能阻尼器主要有磁流变阻尼器、压电变摩擦阻尼器。
8.4.23 黏滞阻尼墙 viscous damping wall
由充满黏性介质的容器(外形像墙)和插入其中的动板所构成,利用动板与容器因相对运动所产生黏滞力与相对位移的滞回特性而耗能的装置。
8.4.24 隔振垫 vibration isolating mat
由弹性聚氨酯或橡胶等弹性材料制成,安置在动力设备、精密设备、建筑结构或轨道道床下起隔振作用的垫形材料。
条文说明
8.4.24 其减振原理主要有两类:一是由材料的几何形状如凹凸或空隙提供更高弹性;二是由弹性材料均匀发泡提供更高弹性。
8.4.25 刚性减振 rigid vibration suppression
在振源区或精密设备区的支承结构,采取整体或局部加大断面,以此改变结构刚度和固有频率,避免共振,实现减弱振源振动输出和精密设备处外界振动输入的方法。
8.4.26 浮筏 floating raft
用来安装机械设备,与基座弹性连接的具有减振降噪作用的台座。
8.4.27 柔性管接头 flexible joint
能够补偿隔振对象与相连的管路之间相对位移的具有弹性的连接接头。
8.4.28 屏障隔振 vibration isolation barrier
在振动传递路径中设置屏障以减弱地面振动传递的影响。
8.4.29 隔振沟 vibration isolation trench
在设备基础与环境振源或动力机器基础与被保护对象之间设置的可以减小振动传递的连续沟槽,沟槽内可填充减少振动传递的材料。
8.4.30 隔振桩墙 vibration isolation pile wall
在设备基础与环境振源或动力机器基础与被保护对象之间设置的可以减小振动传递的排桩或地下连续墙。
8.4.31 智能驱动装置 intelligent actuator device
采用智能驱动材料制作,通过电、磁或温度等调节的驱动装置。
8.4.32 智能阻尼装置 intelligent damping device
采用智能驱动材料制作,通过电、磁或温度等调节的变阻尼装置。
8.4.33 主动调谐质量阻尼器 active tuned mass damper(AT-MD)
由传感器(包括数据采集)、控制器和调谐质量阻尼器等三部分组成的主动振动控制装置。
条文说明
8.4.33 ATMD系统实施控制时,传感器子系统测量结构的干扰或/和反应,并反馈至控制器;控制器按照某种主动控制算法,实时计算主动控制力,并驱动ATMD系统的作动器;然后作动器推动ATMD的惯性质量运动,对结构施加控制力。
9 噪声控制术语
9.1 噪声基础
9 噪声控制术语
9.1 噪声基础
9.1.1 噪声 noise
紊乱断续或统计上随机的声振荡。
条文说明
9.1.1 噪声可以从三个层面上进行解释:
(1)紊乱断续或统计上随机的声振荡;
(2)不需要的声音,可引申为在一定频段中任何不需要的干扰;
(3)超过国家法规或业界标准限值的声音。
9.1.2 无规噪声 random noise
瞬时值不能预先确定的声振荡。无规噪声的瞬时值对时间的分布值服从一定统计分布规律。
条文说明
9.1.2 无规噪声通常在很宽频率范围内具有连续的频谱,但不一定是均匀的,即不一定是白噪声,但白噪声是一种无规噪声。
9.1.3 频带噪声级 octave band noise level
在有限频带内,空气中噪声的声级。频带宽度常使用1/3倍频程或倍频程。
9.1.4 空气声 air-borne sound
建筑中经过空气传播而来的噪声。
条文说明
9.1.4 空气声的声源发生振动,引起周围空气质点的振动,并以疏密相间的纵波形式向四周传播。与声源相接触的传播介质为空气。
9.1.5 结构声 structure-borne sound
建筑中机械振动引起结构振动及传播而导致的声音。
条文说明
9.1.5 与结构声的声源相接触的传播介质为建筑结构。二次辐射噪声和撞击声都属于结构声。结构声也指沿着建筑结构传播的声音,建筑结构为声音传播的介质。
9.1.6 二次辐射噪声 secondary noise
建筑结构因受振源激励而辐射的噪声。通常二次辐射噪声用于城市轨道交通振动而产生的建筑室内噪声。
条文说明
9.1.6 行业标准《城市轨道交通引起建筑物振动与二次辐射噪声限值及其测量方法标准》JGJ/T 170中规定,二次辐射噪声指考虑16Hz~200Hz频率的噪声,二次辐射噪声的评价指标为等效A声级。二次辐射噪声属于结构声。
9.1.7 撞击声 impact sound
在建筑结构上撞击而引起的噪声。
条文说明
9.1.6 行业标准《城市轨道交通引起建筑物振动与二次辐射噪声限值及其测量方法标准》JGJ/T 170中规定,二次辐射噪声指考虑16Hz~200Hz频率的噪声,二次辐射噪声的评价指标为等效A声级。二次辐射噪声属于结构声。
9.1.8 白噪声 white noise
在很宽的频率范围内频谱连续且单位带宽能量与频率无关的噪声信号。
条文说明
9.1.8 白噪声是一种无规噪声。当频率轴为线性标度时,白噪声的频谱图为一条水平线;频率轴为对数标度时,则为一条上升的斜线,斜率为每倍频程3dB。白噪声广泛用于环境声学测量中。
9.1.9 粉红噪声 pink noise
在很宽的频率范围内频谱连续且单位带宽能量与频率成反比的噪声信号。
条文说明
9.1.9 粉红噪声是自然界最常见的噪声。当频率轴为对数标度时,粉红噪声的频谱图为一条水平线。粉红噪声的频率分量功率主要分布在中低频段,常用于进行声学测试的声源。
9.1.10 窄带噪声 narrowband noise
带宽较窄的非纯音噪声,常用的带宽是1/1倍频程和1/3倍频程。
条文说明
9.1.10 可听纯音及窄带噪声均属于有调声。可听纯音的带宽为1Hz,窄带噪声的带宽不定,但非1Hz。
9.1.11 声功率 sound power
单位时间内声源辐射的空气声能量,基准声功率为1pW。
9.1.12 声压 sound pressure
有声波时,媒质中的压强与静压的差值。
9.2 噪声测量与评价
9.2 噪声测量与评价
9.2.1 传声器 microphone
将声信号转换为相应电信号的电声换能器。
条文说明
9.2.1 由于所用换能原理或元件不同,传声器可分为碳粒、电容(静电、驻极体)、电磁、电动(动圈)、铝带、热线、压电(晶体、陶瓷)、磁致伸缩、电子、半导体等多种类型。
9.2.2 全指向传声器 omnidirectional microphone
灵敏度基本上与入射声波方向无关的传声器。亦称为无指向传声器。
条文说明
9.2.2 全指向传声器通常为自由场传声器。自由场传声器所测得的声压是消除了传声器对声场影响后的声压,其自由场灵敏度平直。主要用于消声室等自由场测试,它能比较真实地测量出传声器放入前,该测点的自由场声压。
与自由场传声器相对应的称为压力场传感器。压力场传感器所测得的传声器振膜表面上的声压级,包括了由于传声器本身的存在而引起的声场的变化。常应用于测量边界或壁面上的声压级,在这种场合,传声器构成壁面的一部分,因此测量得到的是壁面自身上的声压级。
9.2.3 声级计 sound level meter
预加校准的,包括传声器、放大器、衰减器、适当计权网络和具有规定动态特性的指示仪表的仪器,用以测量声级。
9.2.4 等效连续声压级 equivalent continuous sound pressure level
在规定的时间内,某一连续稳态声的声压,具有与时变的噪声相同的均方声压,则这一连续稳态声的声级就是此时变噪声的等效声级。
条文说明
9.2.4 等效连续声压级的公式是: 
式中:Leq,T——等效声级,dB; t2—t1——规定的时间间隔,s; pA(t)——噪声瞬时A[计权]声压,Pa; p0——基准声压(20μPa)。
9.2.5 计权有效连续感觉噪声级 weighted effective continu-ous perceived noise level
考虑了白天、晚上、夜间不同时间的影响而修正后的有效感觉噪声级。
条文说明
9.2.5 计权有效连续感觉噪声级用于评价飞机噪声,其最大特点是与飞机昼夜飞行的次数有关。计权有效连续感觉噪声级的计算方法详见现行国家标准《机场周围飞机噪声测量方法》GB 9661。
9.2.6 计权隔声量 weighted sound reduction index
将测得的构件空气声隔声频率曲线与规定的空气声隔声参考曲线按照规定的方法相比较而得出的单值隔声评价量。
条文说明
9.2.6 空气声隔声参考曲线引用自《建筑隔声评价标准》GB/T 50121-2005。
9.2.7 计权规范化撞击声压级 weighted normalized impact sound pressure level
将测得的规范化撞击声压级频率特性曲线与规定的撞击声参考曲线相比较而得出的评价撞击声隔声的单值评价量。
条文说明
9.2.7 撞击声参考曲线引用自国家标准《建筑隔声评价标准》GB/T 50121-2005。对测量得到的楼板表观隔声量进行修正时,利用接受房间的吸声量进行修正。常应用在实验室测量楼板撞击声的情况。
9.2.8 计权标准化撞击声压级 weighted standardized impact sound pressure level
将测得的标准化撞击声压级频率特性曲线与规定的撞击声参考曲线相比较而得出的评价撞击声隔声的单值评价量。
条文说明
9.2.8 对测量得到的楼板表观隔声量进行修正时,利用接受房间的混响时间进行修正。常应用在现场测量楼板撞击声的情况。
9.2.9 响度 loudness
听觉判断声音强弱的属性,根据它可以把声音排成由轻到响的次序,它主要依赖于引起听觉的声压,同时也与声音的频率和波形有关,响度单位为宋(sone)。
9.2.10 计权声压级 weighted sound pressure level
通过频率计权特性A、B、C、D等测得的声压级。
条文说明
9.2.10 根据不同计权特性可记为LA、LB、LC、LD等。
9.2.11 等效连续A声级 equivalent continuous A-weighted sound level
将一定期间内起伏不定的噪声等效成能量相等的一个连续稳定噪声。
9.2.12 A计权声暴露级 A-weighted sound exposure level
将一定时间间隔内的A计权总声能量表示为时间1s的等效量。
9.2.13 累积百分声级 percentile sound level
在规定的测量时间内,有一定比例时间的声级超过某一值,这个值叫做累积百分声级。
条文说明
9.2.13 累积百分声级LN,常用的有L10、L50、L90等。
9.2.14 昼夜等效声级 day-night equivalent sound level
将夜间的噪声级加10dB后与昼间的噪声级一起对它们各自的作用时间进行能量平均而得的噪声级。
9.2.15 交通噪声指数 traffic noise index(TNI)
机动车辆噪声的评价量。
条文说明
9.2.15 可定义为TNJ=L90+4(L10—L90)—30。
9.2.16 混响时间 reverberation time
声音已达到稳态后停止声源,平均声能密度自原始值衰变到其百万分之一(60dB)所需要的时间,单位为秒。
9.3 噪声控制
9.3 噪声控制
9.3.1 降噪系数 noise reduction coefficient(NRC)
对某种材料在250Hz、500Hz、1000Hz、2000Hz测得的吸声系数平均值,算到小数点后两位,末位取0或5。
条文说明
9.3.1 降噪系数与平均吸声系数的区别是,前者是250Hz~2000Hz共4个倍频带的吸声系数平均值,后者为100Hz~4000Hz 1/3倍频带或倍频带的吸声系数平均值。
9.3.2 插入损失 insertion loss
采取某种降噪措施前后,某一噪声敏感点的噪声级差值。
条文说明
9.3.2 插入损失是针对某一测点或一个噪声敏感区域测量采取降噪措施前后的差值,前后两次测量的测点位置不变。而隔声量是测量墙体或楼板两侧,测点布置在墙体或楼板的两边。
9.3.3 整体结构隔振 whole structure isolation
在建筑基础与大地之间设置隔振器或隔振装置以隔离振动的传播,并降低二次辐射噪声。
条文说明
9.3.3 整体结构隔振主要应用于轨道交通对建(构)筑物的干扰问题。虽然处理方式为隔振,但是可同时改善轨道交通对建(构)筑物内的振动及二次辐射噪声影响。
9.3.4 隔声量 sound reduction index
分界面(墙或间壁)一面的入射声功率级与另一面的透射声功率级之差。
9.3.5 透射系数 sound transmission coefficient
在给定频率和条件下,经过分界面(墙或间壁)投射的声功率与入射声功率之比。
9.3.6 吸声系数 sound absorption coefficient
在给定频率和条件下,被分界面(墙或间壁)或媒质吸收的声功率,加上经过分界面透射的声功率所得的和数,与入射声功率之比。
10 工程振动符号
10.1 一般规定
10 工程振动符号
10.1 一般规定
10.1.1 工程振动采用的符号,应由主体符号或主体符号带上、下标构成:
其中S为主体符号,a为上标,b、c、d为下标。
条文说明
10.1.1 工程振动符号一般由单个主体符号表示,或当主体符号需要进一步阐明其含义时应在主体符号右边上、下部位另加代表相应术语或说明语或专用标记的上标或下标共同表示,其中特殊专业下标之间也可用逗号分开表达。当在工程振动设计中使用数学符号或计量单位符号时,则应分别按照表示数学符号的国家标准,或表示法定计量单位的国家法令规定执行,不受本标准的约束。
10.1.2 主体符号代表一般物理量;上、下标代表物理量或物理量以外的术语、说明语,用于进一步阐明主体符号的含义。
10.1.3 符号宜简明。当主体符号的含义不致混淆时,宜少用或不用上、下标;当采用上、下标时,宜优先采用下标,少采用上标;上标宜采用一个,下标可采用一个到三个。
10.1.4 工程振动采用符号的书写和印刷字体,应符合下列规定:
1 主体符号应采用斜体字母;
2 上、下标的字母、数字或标记,除代表序号的字母(i,j,m,n)应采用斜体外,均应采用正体;
3 以小写拉丁字母l作下标时,在印刷时可采用大写拉丁字母L代替。
10.1.5 单个拉丁字母O不应作为主体符号和下标;小写希腊字母c、o、v、k、x不宜作为主体符号和上、下标。
10.1.6 工程振动符号中,代表材料强度等级的符号,应以材料的符号(一个或多个大写正体拉丁字母)和规定的材料强度值(以“N/mm 2 ”或“MPa”计)等共同表示。
10.1.7 工程振动中采用的数学符号,应符合现行国家标准《物理科学和技术中使用的数学符号》GB 3102.11的规定。
10.1.8 工程振动中采用的计量单位符号,应符合《中华人民共和国法定计量单位》的规定。
10.1.9 工程振动中与三维坐标方向有关的符号,未作特殊说明,下标统一用小写拉丁字母x、y、z表示。
10.2 通用符号
10.2 通用符号
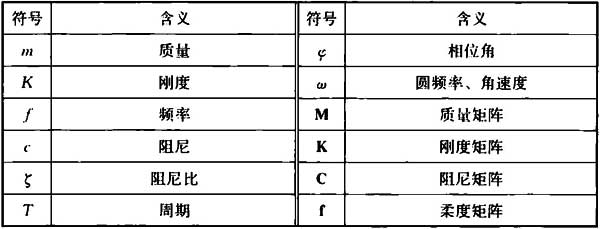
10.2.1 工程振动中与振动特性有关的符号及其含义,应符合表10.2.1的规定。
表10.2.1 工程振动中与振动特性有关的符号及其含义
条文说明
10.2.1 表10.2.1列出了工程振动中与振动特性有关的常用符号,印刷黑体M,K,C和f代表矩阵,与质量m,频率f等作出区别。其中,部分符号既为工程结构设计中的通用符号,也为工程振动中的通用符号,如质量m,可参见《工程结构设计通用符号标准》GB/T 50132-2014。
10.2.2 工程振动中与振动作用有关的符号及其含义,应符合表10.2.2的规定。
表10.2.2 工程振动中与振动作用有关的符号及其含义
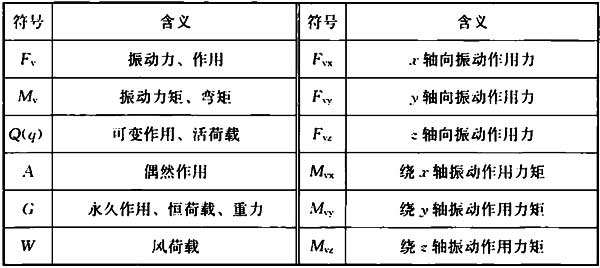
条文说明
10.2.2 表10.2.2列出了工程振动中与振动作用有关的符号,作用的代表值为作用的标准值、作用的组合值等的总称。振动荷载组合计算,可参考《建筑振动荷载标准》GB/T 51228-2017进行计算。当振动力、作用F,振动力矩、弯矩M为矩阵形式时,需要写成黑体F,M。可变作用、活荷载Q(q),括号里面的字母是为了在特定情况下,可能与其他符号容易产生混淆时,允许用相应的字母区分。
10.2.3 工程振动中与振动效应有关的符号及其含义,应符合表10.2.3的规定。
表10.2.3 工程振动中与振动效应有关的符号及其含义
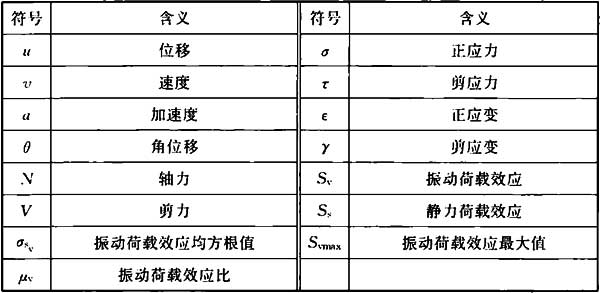
条文说明
10.2.3 表10.2.3列出了工程振动中与振动效应有关的符号,振动作用效应指结构构件在振动荷载作用下,构件内部所产生的内力矩和各种内力。振动荷载效应的计算,可参考《建筑振动荷载标准》GB/T 51228-2017进行计算。关于位移符号,应按x,y,z轴分别采用相应u的带下标表示,即ux,uy,uz。关于速度、加速度符号,按x,y,z轴分别采用相同做法,采用v或a的带下标表示,即vx,vy,vz以及ax,ay,az。
10.2.4 工程振动中与受力状态有关的符号,应符合表10.2.4的规定。
表10.2.4 工程振动中与受力状态有关的符号

10.2.5 工程振动中与振动计算和分析有关的符号及其含义,应符合表10.2.5的规定。
表10.2.5 工程振动中与振动计算和分析有关的符号及其含义
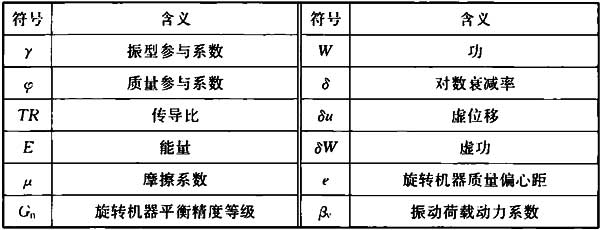
条文说明
10.2.5 表10.2.5列出了工程振动中与振动计算和分析有关的符号,其中,传导比TR,为英文名称“Transmission Ratio”的首字母缩写;能量E,为英文名称“Energy”的首字母缩写;功W,为英文名称“Work”的首字母缩写。
10.2.6 工程振动中与振动传播和振动评价有关的符号及其含义,应符合表10.2.6的规定。
表10.2.6 工程振动中与振动传播和振动评价有关的符号及其含义
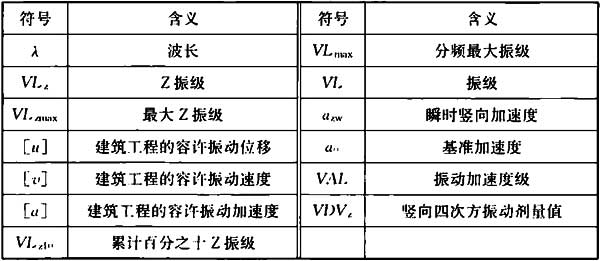
条文说明
10.2.6 表10.2.6列出了工程振动中与振动传播和振动评价有关的符号,其中,振动加速度级VAL,为英文名称“Vibration Acceleration Level”的首字母缩写;竖向四次方振动剂量值VDVz,中的“D”,为英文名称“Dose”的首字母缩写,其他两个“V”,分别是英文名称“Vertical”和“Vibration”的首字母缩写。
10.2.7 工程振动中与振动信号处理有关的符号及其含义,应符合表10.2.7的规定。
表10.2.7 工程振动中与振动信号处理有关的符号及其含义

10.2.8 工程振动中与波浪振动有关的符号及其含义,应符合表10.2.8的规定。
表10.2.8 工程振动中与波浪振动有关的符号及其含义
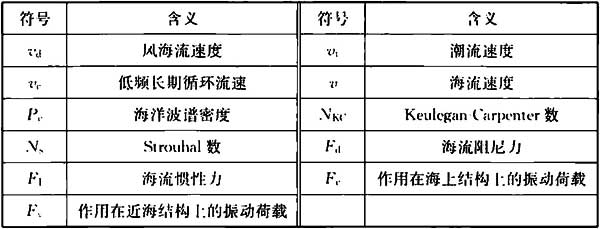
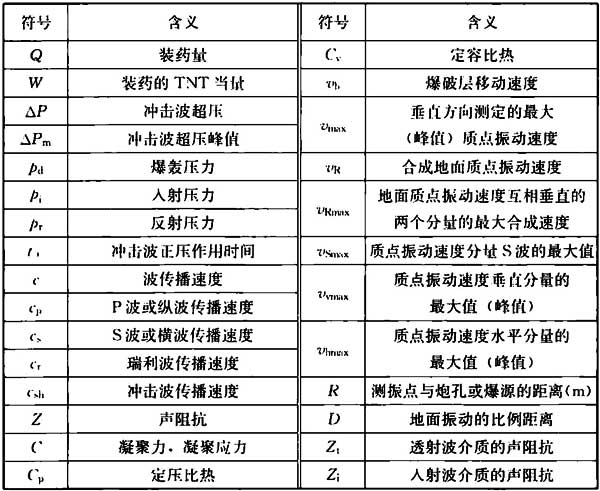
10.2.9 工程振动中与爆破有关的符号及其含义,应符合表10.2.9的规定。
表10.2.9 工程振动中与爆破有关的符号及其含义
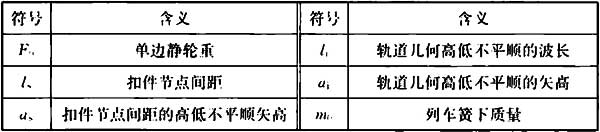
10.2.10 工程振动中与交通振动有关的符号及其含义,应符合表10.2.10的规定。
表10.2.10 工程振动中与交通振动有关的符号及其含义
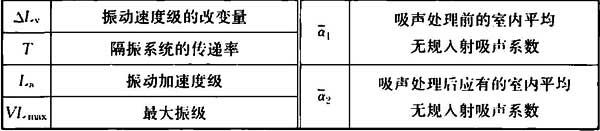
10.2.11 工程振动中与噪声控制有关的符号及其含义,应符合表10.2.11的规定。
表10.2.11 工程振动中与噪声控制有关的符号及其含义

附录A术语索引
附录A 术语索引
(以汉语拼音为序)
B
1 白噪声 white noise(9.1.8)
2 板簧隔振器 plate spring vibration isolator(8.4.5)
3 半主动控制 semi-active control(8.3.2)
4 暴露时间 exposure time(6.1.6)
5 爆破 blasting(3.5.1)
6 爆破地震效应 blasting seismic effect(3.5.5)
7 爆破振动监测 vibration monitoring for blasting(3.5.6)
8 爆破作用 blasting effect(3.5.4)
9 爆炸 explosion(3.5.2)
10 倍频程 octave(5.1.24)
11 被动隔振 passive vibration isolation(8.2.1)
12 被动隔振传递率 transmissibility of passive vibration isolation(8.2.2)
13 被动吸能减振技术 passive energy absorption technology(8.3.7)
14 被动消能减振技术 passive energy dissipation technology(8.3.6)
15 比较法校准 comparison calibration(7.3.4)
16 变刚度变阻尼系统 variable stiffness and variable damp-ing system(8.3.13)
17 变形 deformation(6.3.11)
18 表面重力波 surface gravity wave(3.1.41)
19 波动 wave motion(4.0.6)
20 波动方程 equation of wave motion(4.0.7)
21 波浪能 wave energy(3.1.31)
22 波浪破碎 wave breaking(3.1.32)
23 波浪谱 wave spectrum(3.1.30)
24 波浪要素 essential factors of wave(3.1.25)
25 波形失真 waveform distortion(7.2.13)
26 波形因数 waveform factor(5.1.15)
27 波长 wave length(5.1.14)
28 步行频率 walking frequency(3.6.7)
C
29 采样 sampling(5.2.29)
30 采样频率 sampling frequency(7.4.3)
31 测量不确定度 uncertainty of measurement(7.3.5)
32 测量范围 measurement range(7.2.1)
33 测量误差 measurement error(7.3.6)
34 插入损失 insertion loss(9.3.2)
35 颤振 flutter(3.1.23)
36 颤振抑制 flutter suppression(8.3.21)
37 超地震区 super-seismic zone(3.5.14)
38 长周期地脉动 long period microtremor(3.1.3)
39 潮位 tidal level(3.1.26)
40 驰振 galloping(3.1.22)
41 冲程 stroke(3.4.6)
42 冲击波 shock wave(3.5.9)
43 冲击传感器 shock transducer(7.1.6)
44 冲击隔离 shock isolation(8.1.6)
45 冲击激励 shock excitation(7.5.16)
46 冲击脉冲 shock pulse(3.2.7)
47 冲击能量 impact energy(3.4.8)
48 冲击频率 impact frequency(3.4.7)
49 冲击试验 shock test(7.5.7)
50 冲击响应谱 shock response spectrum(5.3.13)
51 冲击振动 shock vibration(2.2.14)
52 冲击质量 impact mass(3.4.5)
53 传播系数 propagation coefficient(4.0.19)
54 传递比 transmissibility(5.3.19)
55 传递函数 transfer function(5.3.4)
56 传递阻抗 transfer impedance(4.0.20)
57 传感器 transducer/sensor(7.1.1)
58 传声器 microphone(9.2.1)
59 窗函数 window function(7.4.11)
60 纯随机激励 pure random excitation(7.5.12)
61 磁流变阻尼器 magneto-rheological fluid damper(8.4.14)
62 磁流变阻尼控制系统 magneto-rheological damping con-trol system(8.3.22)
63 粗大误差 coarse error(7.3.9)
64 脆性破坏 brittle failure(6.3.31)
65 长波不平顺 longwave irregularity(3.3.7)
66 长时间振动暴露 long-duration vibration exposure(6.1.15)
D
67 单层隔振 single-stage vibration isolation(8.1.7)
68 单自由度系统 single-degree-of-freedom(SDOF)system(2.1.10)
69 倒塌 collapse(6.3.28)
70 等效当量 equivalent(3.5.8)
71 等效剪切波速 equivalent shear wave velocity(4.0.12)
72 等效连续声压级 equivalent continuous sound pressure level(9.2.4)
73 等效连续A声级 equiwdent continuous A-weighted sound level(9.2.11)
74 等振感曲线 equal vibration sensation contour(6.1.2)
75 地冲击 ground shock(3.5.10)
76 地脉动 microtremor(3.1.1)
77 地面粗糙度 ground roughness(3.1.17)
78 电荷放大器 charge amplifier(7.1.8)
79 电流变阻尼器 electro-rheological fluid damper(8.4.13)
80 电涡流阻尼器 eddy current damper(8.4.15)
81 电液隔振系统 electro hydraulic vibration isolation sys-tem(8.3.14)
82 碟形弹簧隔振器 disk-shaped spring vibration isolator(8.4.6)
83 动刚度 dynamic stiffness(2.1.3)
84 动力系数 dynamic coefficient(6.3.16)
85 动水压强 hydrodynamic pressure(3.1.35)
86 动态范围 dynamic range(7.2.9)
87 动态特性测定试验 dynamic characteristic test(7.5.2)
88 动态信号分析仪 dynamic signal analyzer(7.1.12)
89 动应力 dynamic stress(6.3.17)
90 抖振 buffeting(3.1.24)
91 短波不平顺 shortwave irregularity(3.3.8)
92 短时傅里叶变换 short-time Fourier transform(5.2.24)
93 锻锤打击力 striking force of hammer(3.2.2)
94 对数衰减率 logarithmic decrement(5.1.21)
95 短周期地脉动 short period microtremor(3.1.2)
96 多普勒效应 Doppler effect(4.0.13)
97 多自由度系统 multi-degree-of-freedom(MDOF)system(2.1.11)
E
98 二次辐射噪声 secondary noise(9.1.6)
F
99 方差 variance(5.1.22)
100 方向性振动 directional vibration(6.1.10)
101 防振距离 vibration-proof distance(4.0.17)
102 放大系数 magnification factor(5.3.17)
103 非线性振动 non-linear vibration(2.2.13)
104 非线性阻尼 non-linear damping(5.1.6)
105 分频最大振级 frequency division maximum vibration level(5.4.5)
106 粉尘爆炸 dust explosion(3.5.3)
107 粉红噪声 pink noise(9.1.9)
108 风海流 wind-induced drift current(3.1.40)
109 风荷载体型系数 shape coefficient of wind load(3.1.19)
110 风级 wind scale(3.1.12)
111 风力 wind power(3.1.11)
112 风速 wind speed(3.1.14)
113 风向 wind direction(3.1.13)
114 风压 wind pressure(3.1.8)
115 风压高度变化系数 height variation coefficient of wind pressure(3.1.18)
116 风振 wind-induced vibration(3.1.9)
117 风振系数 wind-induced vibration coefficient(3.1.10)
118 峰峰值 peak-to-peak value(2.2.19)
119 峰值 peak value(2.2.18)
120 峰值因数 crest factor(2.2.21)
121 浮筏 floating raft(8.4.26)
122 幅值分析 amplitude analysis(5.2.14)
123 幅值谱 amplitude spectrum(5.3.8)
124 负刚度减振 negative stiffness vibration suppression(8.2.4)
125 傅里叶变换 Fourier transform(5.2.4)
126 傅氏级数 Fourier series(5.2.12)
G
127 概率分布函数 probability distribution function(5.2.16)
128 概率密度函数 probability density function(5.2.17)
129 感生地冲击 induced ground shock(3.5.12)
130 刚性减振 rigid vibration suppression(8.4.25)
131 钢轨波顺 rail corrugation(3.3.9)
132 钢丝绳隔振器 wire rope vibration isolator(8.4.10)
133 隔声量 sound reduction index(9.3.4)
134 隔振 vibration isolation(8.1.1)
135 隔振垫 vibration isolation mat(8.4.24)
136 隔振对象 vibration isolation object(8.1.3)
137 隔振沟 vibration isolation trench(8.4.29)
138 隔振器 vibration isolator(8.4.1)
139 隔振系统vibration isolation system(8.1.2)
140 隔振效率 vibration isolation efficiency(8.2.3)
141 隔振桩墙 vibration isolation pile wall(8.4.30)
142 工作频率 operating frequency(6.2.3)
143 工作时间 work time(6.1.7)
144 功率谱密度 power spectral density(PSD)(5.3.11)
145 共振 resonance(2.2.5)
146 共振频率 resonance frequency(6.2.6)
147 共振试验 resonance test(7.5.4)
148 共振应力 resonance stress(6.3.25)
149 构件变形容许值 allowable deformation of structural components(6.3.14)
150 构件开裂 cracking of structural components(6.3.26)
151 构件挠度容许值 allowable deflection of structural com-ponents(6.3.15)
152 固有频率 natural frequency(5.1.3)
153 固有振动 natural vibration(2.2.1)
154 惯性力 inertial force(6.3.2)
155 光纤传感器信号解调仪 fiber optical sensing interrogator(7.1.14)
156 轨道不平顺 track irregularity(3.3.6)
157 轨道不平顺功率谱密度 power spectral density(PSD)of track irregularity(3.3.11)
158 轨道衰减率 decay rate of track(3.3.12)
H
159 横向灵敏度 transverse sensitivity(7.2.4)
160 横向灵敏度比 transverse sensitivity ratio(7.2.5)
161 互功率谱密度 cross-power spectral density(5.3.12)
162 互相关函数 cross-correlation function(5.2.21)
163 互相关系数 cross-correlation coefficient(5.2.22)
164 环境激励 environment excitation(7.5.17)
165 环境振动 environmental vibration(3.1.4)
166 簧下质量 unsprung mass(3.3.13)
167 恢复力 restoring force(6.3.1)
168 混叠 aliasing(5.2.32)
169 混合控制 hybrid control(8.3.4)
170 混响时间 reverberation time(9.2.16)
J
171 机车-桥耦合振动 train-bridge coupling vibration(3.3.10)
172 机器振动作用 vibration effect of machine(3.2.1)
173 机械导纳 mechanical admittance(5.3.16)
174 机械寿命 mechanical life(6.2.7)
175 机械损伤 mechanical damage(6.2.2)
176 机械阻抗 mechanical impedance(5.3.14)
177 基本风速 reference wind speed(3.1.15)
178 基本风压 reference wind pressure(3.1.16)
179 基频 fundamental frequency(5.1.4)
180 激励 excitation(2.1.14)
181 激振器 vibration exciter(7.5.18)
182 吉布斯效应 Gibbs effect(7.4.14)
183 极限控制力 ultimate control force(8.3.32)
184 极限应变 ultimate strain(6.3.8)
185 计权 weighting(7.4.9)
186 计权标准化撞击声压级 weighted standardized impact sound pressure level(9.2.8)
187 计权等效连续感觉噪声级 weighted effective continuous perceived noise level(9.2.5)
188 计权隔声量 weighted sound reduction index(9.2.6)
189 计权规范化撞击声压级 weighted normalized impact sound pressure level(9.2.7)
190 计权声压级 weighted sound pressure level(9.2.10)
191 加速度传感器/加速度计 acceleration transducer/accel-erometer(7.1.3)
192 加速试验 accelerating test(7.5.9)
193 间断性暴露 interrupted exposure(6.1.14)
194 检定 verification(7.3.1)
195 减振 vibration suppression(8.3.5)
196 剪切波 shear wave(4.0.10)
197 剪应变 shear strain(6.3.6)
198 简谐振动 harmonic vibration(2.2.7)
199 降噪系数 noise reduction coefficient(NRC)(9.3.1)
200 交通噪声指数 traffic noise index(TNI)(9.2.15)
201 角机械阻抗 angular mechanical impedance(5.3.15)
202 角频率 angular frequency(5.1.2)
203 校准 calibration(7.3.2)
204 校准曲线 calibration curve(7.3.12)
205 结构声 structure-borne sound(9.1.5)
206 金属阻尼器 metallic damper(8.4.12)
207 近场 near field(4.0.2)
208 近海结构振动 vibration of offshore structure(3.1.39)
209 聚氨酯隔振器 polyurethane vibration isolator(8.4.8)
210 局部振动 segmental vibration(6.1.9)
211 绝对法校准 absolute calibration(7.3.3)
212 均方根值 root mean square value(RMS)(2.2.20)
213 均方根值速度谱 root mean square(RMS)velocity spectrum(5.3.18)
214 龟裂 crack(6.3.27)
215 均值 mean value(2.2.17)
K
216 抗混叠滤波器 anti-aliasing filter(7.1.10)
217 可变刚度系统 variable stiffness system(8.3.11)
218 可变阻尼系统 variable damping system(8.3.12)
219 气浮式隔振器 air floating vibration isolator(8.4.7)
220 空气声 air-borne sound(9.1.4)
221 库仑阻尼 Coulomb damping(5.1.9)
222 跨地震区 transitional-seismic zone(3.5.15)
223 快速傅里叶变换 fast Fourier transform(FFT)(5.2.6)
224 宽频带随机振动 wide band random vibration(5.1.19)
L
225 浪压力 wave pressure(3.1.33)
226 雷诺数 Reynolds number(3.1.20)
227 累计百分之十Z振级 cumulative ten percent Z vibration level(5.4.3)
228 累积百分声级 percentile sound level(9.2.13)
229 离散傅里叶变换 discrete Fourier transform(5.2.5)
230 离散系统 discrete system(2.1.12)
231 离心机振动作用 vibration effect of centrifuge(3.2.6)
232 力锤 force hammer(7.5.20)
233 连续倒塌 progressive collapse(6.3.29)
234 连续谱 continuous spectrum(5.3.7)
235 连续系统 continuous system(2.1.13)
236 量程 range(7.2.2)
237 列车离心力 centrifugal force of train(3.3.2)
238 列车牵引力 traction force of train(3.3.4)
239 列车竖向动力作用 vertical dynamic effect of train(3.3.1)
240 列车摇摆力 swing force of train(3.3.5)
241 列车制动力 braking force of train(3.3.3)
242 临界转速 critical rotation speed(5.1.13)
243 临界阻尼 critical damping(2.1.6)
244 临界阻尼系数 critical damping coefficient(2.1.7)
245 灵敏度 sensitivity(7.2.3)
246 滤波器 filter(7.1.9)
M
247 脉冲波形 waveform of pulse(3.2.8)
248 脉冲峰值 peak value of pulse(3.2.10)
249 脉冲宽度 width of pulse(3.2.9)
250 脉动风 fluctuating wind(3.1.7)
251 脉冲函数 pulse function(3.2.11)
252 敏感点 sensitive point(6.1.3)
253 敏感区 sensitive area(6.1.4)
254 模糊控制 fuzzy control(8.3.17)
255 模数转换 analogue-to-digital conversion(5.2.30)
256 模态参数 modal parameter(5.2.9)
257 模态分析 modal analysis(5.2.3)
258 模态试验 modal test(7.5.6)
259 模态坐标 modal coordinates(5.2.8)
260 摩擦阻尼器 friction damper(8.4.17)
N
261 奈奎斯特频率 Nyquist frequency(7.4.4)
262 耐振试验 vibration endurance test(7.5.5)
263 挠度 deflection(6.3.10)
264 能量谱密度 energy spectral density(5.3.10)
265 黏弹性阻尼器 viscoelastic damper(8.4.16)
266 黏滞阻尼器 viscous damper(8.4.11)
267 黏滞阻尼墙 viscous damping wall(8.4.23)
O
268 耦合振动 coupled vibration(2.2.6)
P
269 拍振 beat vibration(4.0.15)
270 疲劳 fatigue(6.3.18)
271 疲劳裂纹扩展 fatigue crack propagation(6.3.20)
272 疲劳破坏 fatigue failure(6.3.22)
273 疲劳损伤 fatigue damage(6.3.21)
274 疲劳应力 fatigue stress(6.3.19)
275 疲劳与熟练程度降低 fatigue and decreased proficiency(6.1.13)
276 偏心距 eccentric radius(3.4.3)
277 偏心力矩 eccentric moment(3.4.4)
278 偏心质量 eccentric mass(3.4.2)
279 漂移 drift(7.2.7)
280 频带噪声级 octave band noise level(9.1.3)
281 频率 frequency(5.1.1)
282 频率分辨率 frequency resolution(5.2.11)
283 频率分析 frequency analysis(5.2.10)
284 频率响应函数 frequency response function(5.3.5)
285 频域分析 frequency domain analysis(5.2.2)
286 平衡精度等级 balance accuracy grade(3.2.14)
287 平滑处理 smoothing(7.4.7)
288 平均 averaging(7.4.8)
289 平均风 average wind(3.1.6)
290 平稳过程 stationary process(5.2.27)
291 屏障隔振 screen vibration isolation(8.4.28)
292 谱 spectrum(5.3.6)
Q
293 去趋势项 detrending(7.4.6)
294 全身振动 whole-body vibration(6.1.8)
295 全指向传声器 omnidirectional microphone(9.2.2)
R
296 人行荷载 walking load(3.6.1)
297 人行天桥振动 footbridge vibration(3.6.6)
298 人行动力因子 dynamic factor of walking(3.6.5)
299 人群有节奏运动 rhythmic motion(3.6.3)
300 人群自由行走 free walking(3.6.2)
301 人体舒适性 human comfort(6.1.1)
302 柔性管接头 flexible joint(8.4.27)
303 瑞利波 Rayleigh wave(4.0.11)
S
304 扫描正弦激励 sweeping sinusoidal excitation(7.5.11)
305 砂土液化 liquefaction of sand soil(6.3.30)
306 设计控制力 design control force(8.3.28)
307 神经网络控制 neural network control(8.3.18)
308 声功率 sound power(9.1.11)
309 声级计 sound level meter(9.2.3)
310 声压 sound pressure(9.1.12)
311 失效 invalidation(6.2.1)
312 时间常数 time constant(7.2.11)
313 时域分析 time domain analysis(5.2.1)
314 受迫振动 forced vibration(2.2.3)
315 数据 data(7.4.1)
316 数据采集仪 data acquisition instrument(7.1.11)
317 数据预处理 data preprocessing(7.4.5)
318 数据长度 data length(7.4.2)
319 数模转换 digital-to-analogue conversion(5.2.31)
320 数字存储示波器 digital storage oscilloscope(7.1.15)
321 数字滤波 digital filtering(7.4.10)
322 衰减系数 attenuation coefficient(4.0.18)
323 双层隔振 double-stage vibration isolation(8.1.8)
324 水力坡度 hydraulic gradient(3.1.38)
325 水压力 water pressure(3.1.34)
326 瞬态随机激励 transient random excitation(7.5.15)
327 瞬态响应 transient response(5.3.2)
328 瞬态振动 transient vibration(2.2.11)
329 速度传感器 velocity transducer(7.1.4)
330 速度共振 velocity resonance(6.2.5)
331 塑性变形 plastic deformation(6.3.13)
332 随机误差 random error(7.3.8)
333 随机振动 random vibration(2.2.9)
T
334 弹性半空间 elastic half space(4.0.5)
335 弹性变形 elastic deformation(6.3.12)
336 弹性波 elastic wave(4.0.8)
337 弹性介质 elastic medium(4.0.4)
338 调谐质量阻尼器 tuned mass damper(TMD)(8.4.3)
339 通道一致性 channel consistency(7.2.14)
340 通频带 pass-band(7.2.15)
341 统计分析 statistical analysis(5.2.15)
342 透射系数 sound transmission coefficient(9.3.5)
W
343 往复惯性力 reciprocating inertia force(3.2.12)
344 往复式机器振动作用 vibration effect of reciprocating machine(3.2.4)
345 伪随机激励 pseudo random excitation(7.5.13)
346 位移 displacement(6.3.9)
347 位移传感器 displacement transducer(7.1.5)
348 位移共振 displacement resonance(6.2.4)
349 位置水头 position head(3.1.37)
350 魏格纳分布 Wigner distribution(5.2.26)
351 稳定性 stability(7.2.8)
352 稳态响应 steady response(5.3.3)
353 稳态振动 steady vibration(2.2.10)
354 涡激振动 vortex-induced vibration(3.1.21)
355 无规噪声 random noise(9.1.2)
356 无线传感器网络 wireless sensor network(7.1.13)
X
357 吸声系数 sound absorption coefficient(9.3.6)
358 系统误差 systematic error(7.3.7)
359 线性二次型调节器控制 linear quadratic regulator con-trol(8.3.9)
360 线性振动 linear vibration(2.2.12)
361 线性阻尼 linear damping(5.1.7)
362 线性阻尼系数 linear damping coefficient(5.1.8)
363 线应变 linear strain(6.3.5)
364 相干函数 coherence function(5.2.23)
365 相关分析 correlation analysis(5.2.18)
366 相位 phase(2.2.16)
367 相位谱 phase spectrum(5.3.9)
368 响应 response(2.1.15)
369 响应时间 response time(7.2.10)
370 响度 loudness(9.2.9)
371 橡胶隔振器 rubber vibration isolator(8.4.9)
372 小波变换 wavelet transform(5.2.25)
373 协方差 covariance(5.1.23)
374 谐波 harmonic wave(5.1.20)
375 谐波响应 harmonic response(5.3.1)
376 谐响应分析 harmonic response analysis(5.2.7)
377 谐振频率 resonant frequency (7.2.12)
378 泄漏 leakage(7.4.12)
379 信号处理 signal processing(5.2.28)
380 形状记忆合金阻尼器 shape memory alloy damper(8.4.21)
381 旋转惯性力 rotational inertia force(3.2.13)
382 旋转式机器振动作用 vibration effect of rotary machine(3.2.5)
Y
383 压电材料 piezoelectric material(8.4.20)
384 压电效应 piezoelectric effect(8.4.19)
385 压力机振动作用 vibration effect of press machine(3.2.3)
386 压力梯度 pressure gradient(3.1.36)
387 压缩波 compression wave(4.0.9)
388 亚地震区 sub-seismic zone(3.5.16)
389 延性破坏 ductile failure(6.3.32)
390 液体自由表面波 free surface wave of liquid(3.1.27)
391 液体自由表面进行波 free surface travelling wave of liq-uid(3.1.28)
392 液体自由表面驻波 free surface standing wave of liquid(3.1.29)
393 遗传算法 genetic algorithm(8.3.19)
394 影响人体的机械振动猝发 burst of mechanical vibration affecting human(6.1.16)
395 影响人体的间歇性振动 intermittent vibration affecting human(6.1.17)
396 应变 strain(6.3.4)
397 应变放大器 strain amplifier(7.1.7)
398 应力集中 stress concentration(6.3.23)
399 应力松弛 stress relaxation(6.3.24)
400 有效均布活荷载 homogeneously distributed live load(3.6.4)
401 圆柱螺旋钢弹簧隔振器 cylindrical spiral steel spring vi-bration isolator(8.4.4)
402 远场 far field(4.0.3)
Z
403 载荷识别试验 load identification test(7.5.3)
404 噪声 noise(9.1.1)
405 栅栏效应 picket fence effect(7.4.13)
406 窄带噪声 narrowband noise(9.1.10)
407 振动 vibration(2.1.1)
408 振动传感器 vibration transducer(7.1.2)
409 振动环境试验 vibration environment test(7.5.1)
410 振动加速度 vibration acceleration(5.1.18)
411 振动加速度级 vibration acceleration level(5.4.1)
412 振动控制对象 vibration control object(8.3.15)
413 振动控制系统极限加速度 acceleration capacity of VCS(8.3.31)
414 振动控制系统极限速度 velocity capacity of VCS(8.3.30)
415 振动控制系统极限位移 displacement capacity of VCS(8.3.29)
416 振动控制系统鲁棒性 robustness of VCS(8.3.24)
417 振动控制系统设计加速度 design acceleration of VCS(8.3.27)
418 振动控制系统设计速度 design velocity of VCS(8.3.26)
419 振动控制系统设计位移 design displacement of VCS(8.3.25)
420 振动控制系统稳定性 stability of VCS(8.3.23)
421 振动模态 vibration mode(5.1.11)
422 振动耐限 vibration tolerance(6.1.12)
423 振动试验台 vibration generator/vibration machine(7.5.19)
424 振动衰减 vibration attenuation(4.0.16)
425 振动速度 vibration velocity(5.1.17)
426 振动位移 vibration displacement(5.1.16)
427 振动系统 vibration system(2.1.2)
428 振动系统识别 vibration system identification(5.2.13)
429 振动限度 vibration limit(6.1.5)
430 振动质量 vibration mass(3.4.1)
431 振动准则 vibration criterion(6.1.11)
432 振幅 amplitude(2.2.15)
433 振型 modal shape of vibration(5.1.10)
434 振源 vibration source(4.0.1)
435 整体结构隔振 whole structure insolation(9.3.3)
436 正弦激励 sinusoidal excitation(7.5.10)
437 直接地冲击 direct ground shock(3.5.11)
438 智能材料 intelligent material(8.4.18)
439 智能控制 intelligent control(8.3.3)
440 智能控制算法 intelligent control algorithm(8.3.16)
441 智能驱动装置 intelligent actuator device(8.4.31)
442 智能阻尼装置 intelligent damping device(8.4.32)
443 智能阻尼器 intelligent damper(8.4.22)
444 周期随机激励 periodic random excitation(7.5.14)
445 周期振动 periodic vibration(2.2.8)
446 主动隔振 active vibration isolation(8.1.4)
447 主动隔振隔振传递率 transmissibility of active vibration isolation(8.1.5)
448 主动控制 active control(8.3.1)
449 主动调谐质量阻尼器 active tuned mass damper(AT-MD)(8.4.33)
450 主动振动控制系统 active vibration control system(8.3.10)
451 主应变 principal strain(6.3.7)
452 主应力 principal stress(6.3.3)
453 驻波 standing wave(4.0.14)
454 装药量 charge mass(3.5.7)
455 撞击声 impact sound(9.1.7)
456 准确度 accuracy(7.2.6)
457 准确度等级 accuracy class(7.3.11)
458 卓越周期 predominant period(3.1.5)
459 自功率谱密度 self-power spectrum density(5.1.12)
460 自激振动 self-excited vibration(2.2.4)
461 自适应控制算法 adaptive control algorithm(8.3.20)
462 自相关函数 self-correlation function(5.2.19)
463 自相关系数 self-correlation coefficient(5.2.20)
464 自由场 free field(3.5.13)
465 自由度 degree of freedom(2.1.9)
466 自由振动 free vibration(2.2.2)
467 综合试验 comprehensive test(7.5.8)
468 阻抗头 impedance head(7.5.21)
469 阻尼 damping(2.1.4)
470 阻尼比 damping ratio(2.1.8)
471 阻尼固有频率 damped natural frequency(5.1.5)
472 阻尼器 damper(8.4.2)
473 阻尼系数 damping coefficient(2.1.5)
474 最大Z振级 maximum Z vibration level(5.4.4)
475 最大允许误差 maximum permissible error(7.3.10)
476 中心频率 central frequency(2.2.22)
477 昼夜等效声级 day-night equivalent sound level(9.2.14)
其他
478 3dB带宽 3dB bandwidth(7.2.16)
479 A计权声暴露级 A-weighted sound exposure level(9.2.12)
480 PID控制 Proportion-Integral Derivation control(8.3.8)
481 Z振级 Z vibration level(5.4.2)
本标准用词说明
本标准用词说明
1 为便于在执行本标准条文时区别对待,对要求严格程度不同的用词说明如下:
1)表示很严格,非这样做不可的:
正面词采用“必须”;反面词采用“严禁”;
2)表示严格,在正常情况下均应这样做的:
正面词采用“应”;反面词采用“不应”或“不得”;
3)表示允许稍有选择,在条件许可时首先这样做的:
正面词采用“宜”;反面词采用“不宜”;
4)表示有选择,在一定条件下可以这样做的,采用“可”。
2 条文中指明应按其他有关标准执行的写法为:“应符合……的规定”或“应按……执行”。
引用标准名录
引用标准名录
1 《工程结构设计基本术语标准》GB/T 50083
2 《工程结构设计通用符号标准》GB/T 50132
3 《物理科学和技术中使用的数学符号》GB 3102.11